Samochód - Robot

Sterowane inteligentnym algorytmem, wyposażone w dużą liczbę czujników będą mogły za jakiś czas docierać praktycznie wszędzie, nawet tam, gdzie ludzki organizm nie wytrzymuje ułamka sekundy.
Pozwolą ludziom zaoszczędzić ogromne ilości czasu, poświęcanego dotąd np. na monotonną jazdę autostradą, dadzą możliwość swobodnego przemieszczania się osobom niepełnosprawnym, znajdą zastosowania w przemyśle wydobywczym, wytwórczym, w wojsku, transporcie, lotnictwie i wielu innych dziedzinach. Będą dużym krokiem w rozwoju cywilizacyjnym człowieka.
21 marca 2012 r. grupa studentów z międzywydziałowego Koła Naukowego Pojazdów i Robotów Mobilnych Politechniki Wrocławskiej Katedry Inżynierii Pojazdów rozpoczęła prace nad swoim pojazdem autonomicznym.
Koncern Toyota przekazał na rzecz Koła samochód Yaris (1), a następnie studenci przystosowali pojazd do samodzielnego poruszania się. W tym celu wszystkie elementy wykonawcze zostały zaadaptowane do sterowania za pomocą komputera. W trakcie prac zmodyfikowano podstawowe elementy sterujące autem (2), takie jak układ hamulcowy, układ kierowniczy, zespół przepustnicy.
Oryginalnie zamontowana manualna skrzynia biegów została zastąpiona automatycznym odpowiednikiem, który wzbogacono o możliwość wybierania przełożeń z poziomu komputera. Instalację elektryczną przystosowano do zmienionych komponentów.


Prace przy pojeździe

Wnętrze przystosowano do zamontowania osprzętu elektronicznego tak, by zachować charakter seryjnego pojazdu. Pojawiły się nowe regulatory prądu, sterowniki, zasilacze.
Toyota wzbogaciła się również o pokaźną liczbę dodatkowych czujników, pozwalających monitorować pojazd i działanie dodatkowych elementów.
Zaprojektowany został również interfejs pozwalający na podłączenie elementów wykonawczych do jednostki centralnej.
Podczas wykonywanych prac pojazd służył jako obiekt badawczy i pozwolił studentom lepiej poznać techniki inżynierii odwrotnej.
Auto i jego elementy zostało zeskanowane skanerem 3D. Powstały w ten sposób trójwymiarowy model został przeniesiony do komputerowego programu typu CAD, gdzie w technologii 3D wykonywana jest cała dokumentacja modyfi kacji pojazdu (3).
Rozwój oprogramowania
Prace programistyczne skupiły się na kilku funkcjach.

1. Stworzenie spójnej mapy otoczenia pojazdu - powiązanie ze sobą odczytów czujników auta w celu zbudowania mapy reprezentującej najbliższe otoczenie pojazdu wraz z przeszkodami.
2. Lokalizacja pojazdu - znalezienie aktualnego położenia auta na mapie, w oparciu o dane spływające z sensorów.
3. Jednoczesna lokalizacja i mapowanie pojazdu. Wyznaczenie jednostkowych realnych przesunięć samochodu na podstawie obserwacji otoczenia.
Na ilustracji 4 przedstawiony jest system rozpoznawania pasów ruchu. W górnym prawym rogu widać otrzymywany obraz z kamery. W dolnej części pokazano kolejne kroki przetwarzania, zaś w górnym lewym rogu widoczne są wykryte linie oddzielające pasy ruchu oraz punkty wyznaczające środek aktualnego pasa ruchu.
Zaawansowanie prac przy pojeździe
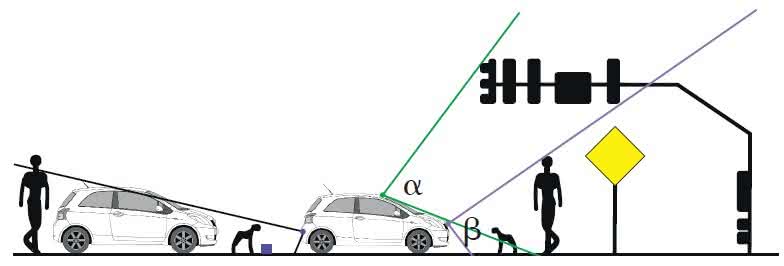
W chwili obecnej pojazd może m.in. poruszać się dzięki zdalnemu sterowaniu za pomocą komputera lub komunikacji bezprzewodowej (5). Na bazie obrazu z kamery, znajdującej się na stelażu umiejscowionym na dachu pojazdu (6), system rozpoznaje skrajnie jezdni oraz wyznacza jej oś, po czym auto może bez udziału człowieka podążać zadaną trasą.
Obecnie prace zespołu skupiają się na testach dotychczasowych rozwiązań, rozwoju oprogramowania oraz systemie komunikacji z otoczeniem (7), w którego skład wchodzą kamery, radary, skanery laserowe, czujniki ultradźwiękowe i inne.


Zespół
Nad projektem pracował trzydziestoosobowy zespół studentów, którego liderem był Zbigniew Żelazny, obecnie doktorant Katedry Inżynierii Pojazdów Politechniki Wrocławskiej. Projekt został zakończony sukcesem i 14 grudnia 2012 r., podczas I Mistrzostw Polski Robotów, zdobył nagrodę specjalną.
Pojazd był wielokrotnie prezentowany na konferencjach, imprezach naukowych oraz w mediach. Na jego bazie powstało kilkanaście prac dyplomowych inżynierskich i magisterskich. Aktualnie Koło Naukowe Pojazdów i Robotów Mobilnych prowadzi prace nad innymi projektami. Są wśród nich m.in:
• motocykl elektryczny LEM - Light Electric Motorcycle,
• samochód elektryczny do drifftu ZEC - Zero Emission Car,
• pojazd z materiałów przyszłości LEV - Light Electric Vehicle.
O niektórych projektach można przeczytać na stronie internetowej: http://pirm.pwr.wroc.pl/ Aktualności znajdują się pod adresem: https://www.facebook.com/knpirm W razie pytań oraz chęci dołączenia do Koła można pisać na adres: pirm@pwr.edu.pl Na temat II Mistrzostw Polski Robotów można zaś przeczytać na stronie: www.instytutinwentyki.pl
Piotr A. Wrzecioniarz,
prof. Politechniki Wrocławskiej, opiekun Koła
Zbigniew Żelazny, prezes Koła