Robot z mackami do chwytania delikatnych przedmiotów
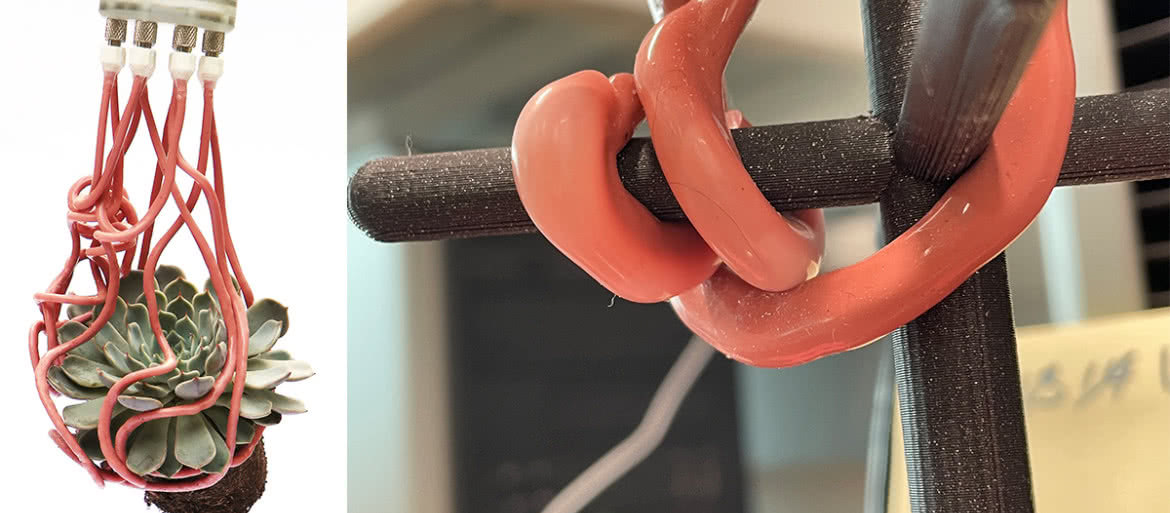
Oplatające chwytane obiekty, długie na ok. 30 cm puste, gumowe rurki po jednej stronie mają gumę grubszą niż po drugiej, więc gdy "macka" jest pod ciśnieniem, skręca się jak warkocz lub wyprostowuje jak włosy w deszczowy dzień. Każdy splot zwiększa siłę chwytu. Mimo że łącznie jest ona wysoka, to każdy indywidualny kontakt nie ma dużej siły i nie jest w stanie uszkodzić nawet najbardziej wrażliwego obiektu. W celu uwolnienia obiektu, rurki są po prostu dekompresowane.
Naukowcy przeprowadzili symulacje i eksperymenty sprawdzające skuteczność chwytaka, który podnosił szereg obiektów, w tym różne rośliny oraz zabawki. Ich zdaniem, chwytak mógłby być wykorzystywany w praktyce do chwytania miękkich owoców i warzyw w produkcji rolnej i dystrybucji, delikatnych tkanek w branży medycznej, a nawet obiektów o nieregularnych kształtach w magazynach, np. przedmiotów szklanych.
Prezentacja możliwości robota z mackami chwytającymi:
Źródło: www.seas.harvard.edu, zdjęcie: Harvard Microrobotics Lab/Harvard SEAS seas.harvard.edu
Mirosław Usidus