Automatyzacja - jak maszyny zaczęły myśleć za nas
V–III w. p.n.e. Za pierwszych, którzy potrafili zaprojektować i zbudować samosterujące się maszyny, uchodzą starożytni Grecy. Istnieją dowody na to, że zbudowano w Grecji automaty z brązu przedstawiające orła i delfina, które były wystawiane na igrzyskach olimpijskich. Wiadomo, że jeden z autorów, znany jako Filon z Bizancjum (ok. 280 p.n.e. –220 p.n.e.), skonstruował powtarzalną kuszę. Ok. 270 r. p.n.e. Ktesibius z Aleksandrii opisał regulator pływakowy do zegara wodnego, urządzenie podobne do mechanizmu znanego ze współczesnej spłuczki toaletowej. Był to najstarszy znany mechanizm sterowany sprzężeniem zwrotnym.
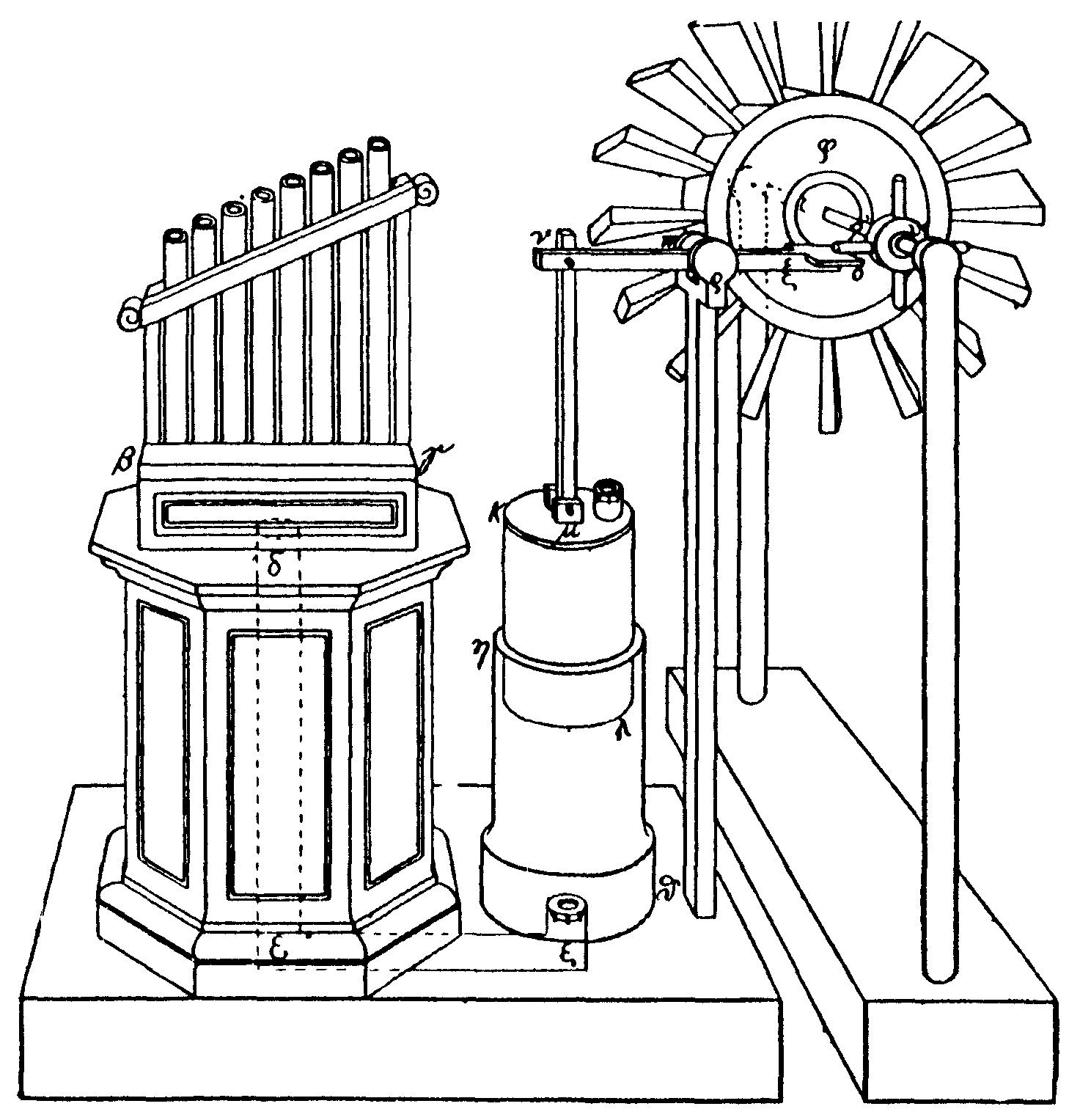
ok. 50 n.e. Greckiemu wynalazcy Heronowi z Aleksandrii przypisuje się opracowanie zautomatyzowanego systemu, który otwierał drzwi świątyni, gdy kapłan rozpalał ogień na świątynnym ołtarzu. Opisał on także w swoich dziełach wiele automatów i maszyn samobieżnych. Oparte były na systemach hydraulicznych i napędzanych wiatrem (1). Opisał nawet samobieżny wózek. Skonstruował również wiele machin wojennych. Są przekazy, że w w Aleksandrii istniał teatr składający się wyłącznie z automatów, które wystawiały dramaty dla publiczności.
850 Bracia Banū Mūsā z Persji, w swojej „Księdze Pomysłowych Urządzeń” opisali szereg automatycznych układów sterowania, w tym dwustopniowe regulatory poziomu płynów oraz regulatory wykorzystujące sprzężenie zwrotne.
1624 Niderlandzki inżynier i wynalazca Cornelis Jacobszoon Drebbel (2) opracowuje pierwsze regulatory temperatury. Wynalazł inkubator dla kurczaków i termostat rtęciowy, który automatycznie utrzymywał inkubator w stałej temperaturze. Było to jedno z pierwszych zarejestrowanych urządzeń sterowanych sprzężeniem zwrotnym w dziedzinie kontroli temperatury.

1725 Jednym z najbardziej zaawansowanych w swoich czasach przykładów zautomatyzowanej maszynerii było krosno ciągnione zaprojektowane przez francuskiego wynalazcę Basile’a Bouchona. Instrukcje sterujące działaniem krosna Bouchona zostały zapisane na arkuszach papieru w postaci otworów. Na podstawie otworu lub jego braku igły przenosiły nić przez krosno w procesie wytwarzania wzoru na tkaninie. Był to pierwszy przykład sterowania za pomocą kodowania.
XVII w. Regulatory odśrodkowe, znane również jako „regulatory kulkowe”, zostały wynalezione przez Christiaana Huygensa i od jego czasów są używane do regulacji kamieni młyńskich.
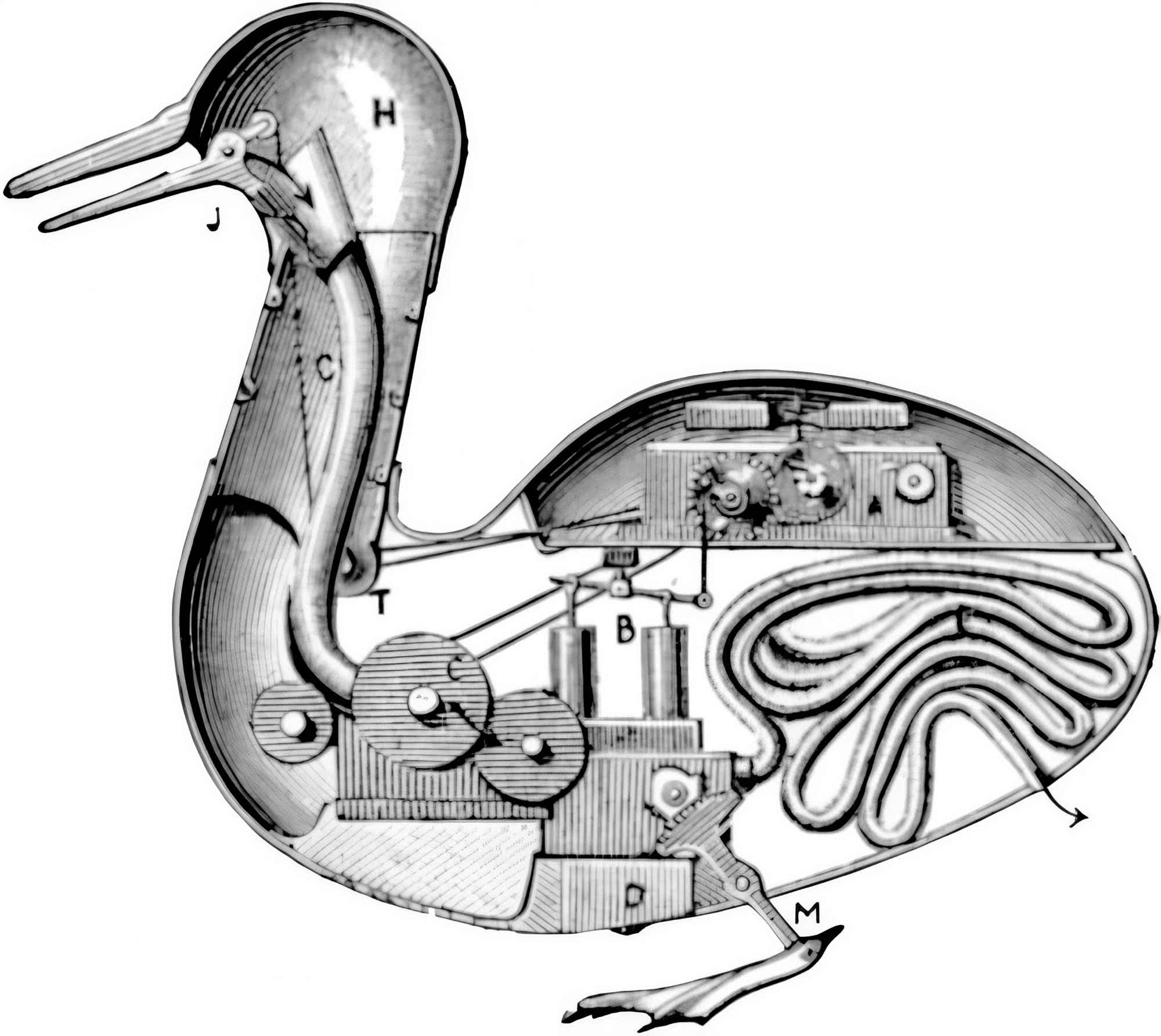
1727–45 Francuz Jacques de Vaucanson w wieku zaledwie 18 lat zaczął budować automaty przypominające ludzi, które miały podawać dla gości kolację i sprzątać ze stołów. W 1737 roku Vaucanson zbudował Flecistę, naturalnej wielkości figurę pasterza, który miał w repertuarze dwanaście piosenek. W kolejnych latach zbudował szereg kolejnych automatów humanoidalnych i naśladujących zwierzęta (3). W 1745 roku stworzył pierwsze na świecie całkowicie zautomatyzowane krosno, opierając się na wcześniejszych pracach Basile’a Bouchona. Vaucanson próbował zautomatyzować francuski przemysł tekstylny za pomocą kart dziurkowanych – technologii, która, udoskonalona potem przez Josepha-Marie Jacquarda, zrewolucjonizowała tkactwo, a w XX wieku byłaby wykorzystywana do wprowadzania danych do komputerów i przechowywania informacji w formie binarnej. Jego pomysły nie zostały jednak dobrze przyjęte przez tkaczy, a wiele z jego rewolucyjnych pomysłów zostało w dużej mierze zignorowanych.
1788 Najwcześniejsze silniki parowe wymagały ręcznego otwierania i zamykania zaworów, w celu wpuszczenia pary do komory tłoka, a następnie jej odprowadzenia. Później opracowano zawory suwakowe, które automatycznie realizowały te funkcje. Jedyną pracą ludzkiego operatora było wówczas regulowanie ilości pary. Ta ludzka praca przy obsłudze silnika parowego została wyeliminowana przez regulator obrotów. James Watt zaadaptował jeden ze znanych już od lat regulatorów odśrodkowych do sterowania silnikiem parowym. Urządzenie to składało się z kuli umieszczonej na zawiasowym ramieniu (4), mechanicznie połączonym z wałem wyjściowym silnika. Wraz ze wzrostem prędkości obrotowej wału siła odśrodkowa powodowała przesunięcie kuli na zewnątrz. Ruch ten sterował zaworem, który zmniejszał ilość podawanej pary, spowalniając go. To przykład systemu sterowania z ujemnym sprzężeniem zwrotnym, w którym rosnąca moc wyjściowa systemu jest wykorzystywana do redukcji.

1783–90 Automatyczny młyn do mąki opracowany przez Olivera Evansa uznaje się za pierwszy całkowicie zautomatyzowany proces przemysłowy. Evans eksperymentował z wynalazkami, by zmniejszyć zależność od siły roboczej przy mieleniu. Projekty młynów Evansa (5) miały na celu także ciągłe podawanie materiałów przez system bez potrzeby jakiejkolwiek interwencji człowieka. Próbował radykalnie zmienić sposób myślenia o procesie produkcyjnym, traktując go jako ciągłą, zintegrowaną całość, a nie serię odizolowanych procesów, by w efekcie produkcja była w pełni zautomatyzowaną linią produkcyjną.

1801 Joseph-Marie Jacquard opracowuje swój system kart dziurkowanych do programowania krosien, dzięki któremu były one zdolne do tworzenia złożonych wzorów na tekstyliach przez kontrolowanie ruchów wielu czółenek z różnokolorowych nici. Wybór różnych wzorów był określany przez program zawarty na stalowych kartach (6).
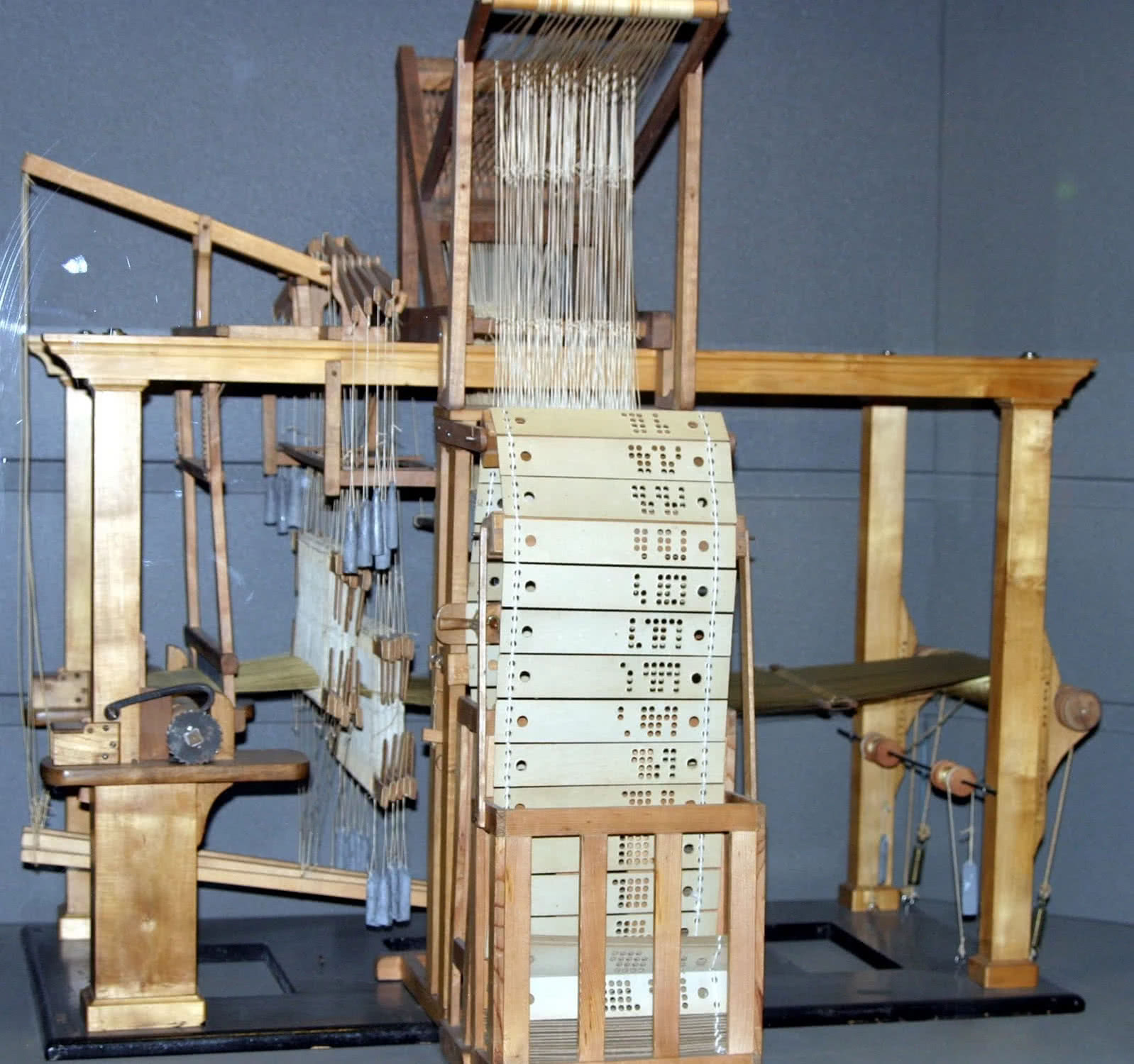
kartami Josepha-Marie Jacquarda.
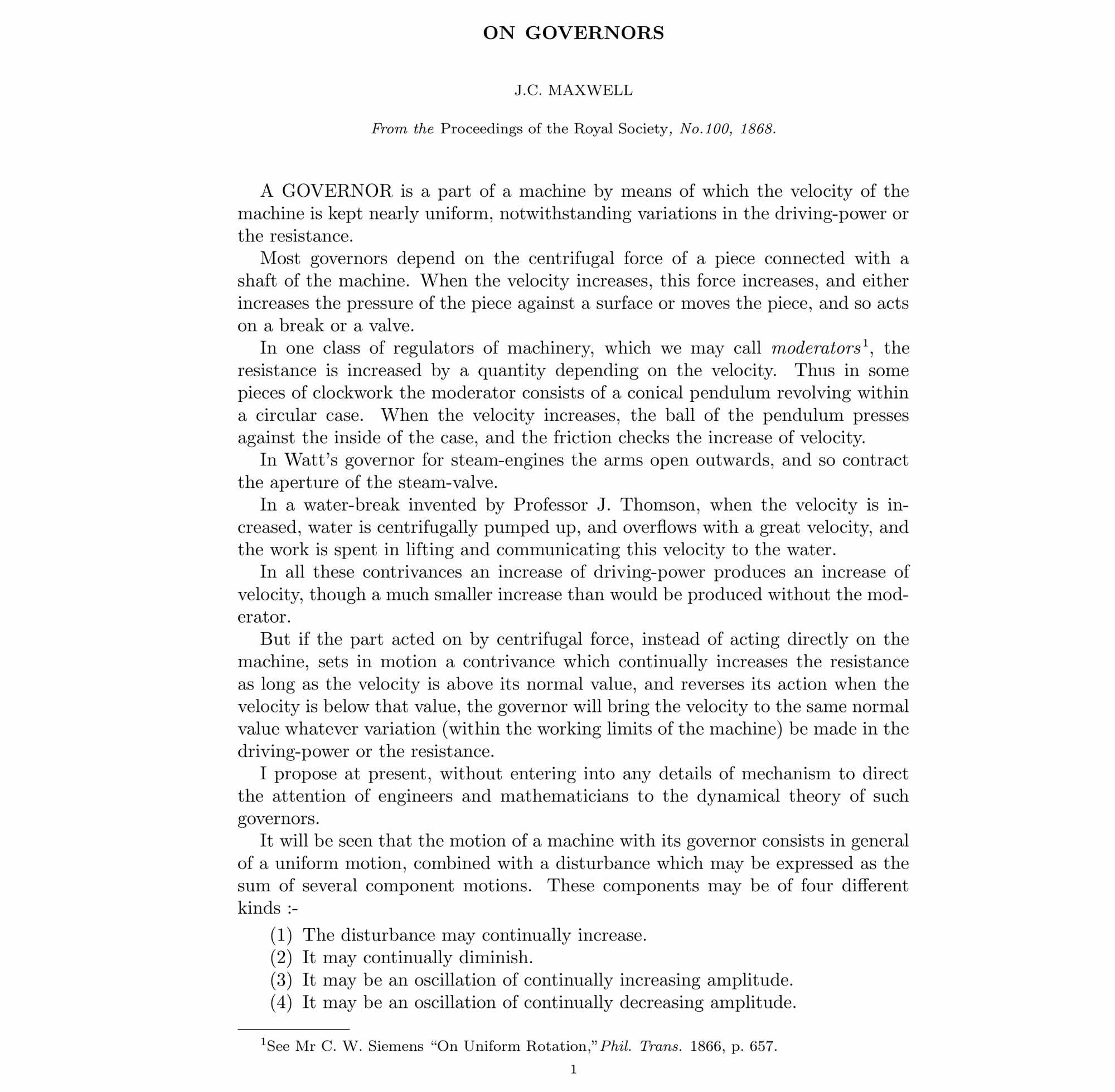
1868 James Clerk Maxwell publikuje artykuł pod tytułem „On Governors” (7), w którym ustanawia teoretyczne podstawy teorii sterowania. Dzieło Maxwella opisywało w sposób naukowy działanie regulatorów, które już były od wieków wykorzystywane do regulowania prędkości m.in. wiatraków czy wspomnianych maszyn parowych. W swoich rozważaniach naukowych Maxwell nie tylko opisał te regulatory, ale także zagłębił się w zjawisko samooscylacji, podkreślając przypadki, w których opóźnienia systemu mogą prowadzić do nadmiernej kompensacji i niestabilnego zachowania w układach.
pod tytułem „On Governors”
lata 30.–50. XX wieku Pojawiają się sterowniki działające w technice przekaźnikowo-stycznikowej, a później także półprzewodnikowej, ale konstruowane jako sztywna sieć logiczna. Potrafiły wprowadzać obliczone zmiany w odpowiedzi na odchylenia od wartości zadanej, zamiast prostego sterowania dawnego typu włącz-wyłącz. W przewodowych programowanych sterownikach logicznych do kontroli procesów i automatyzacji zostały przyjęte półprzewodnikowe cyfrowe moduły logiczne. W 1959 roku rafineria Port Arthur firmy Texaco stała się pierwszym zakładem chemicznym, w którym zastosowano sterowanie cyfrowe.
1946–51 Rozwój elektronicznych komputerów cyfrowych (ENIAC, Electronic Numerical Integrator and Computer) i UNIVAC I (Universal Automatic Computer I) pozwolił na udoskonalenie funkcji sterowania w automatyce. Obliczenia były wykonywane znacznie szybciej.
lata 50. XX w. Pierwszy program, który można uznać za protoplastę sztucznej inteligencji, został opracowany w 1951 r. przez Christophera Stracheya. Zaprogramował on generator listów miłosnych dla Ferranti Mark 1, pierwszy przykład literatury generowanej komputerowo. Stworzył też program do gry w warcaby. Akademickie uznanie sztuczna inteligencja zyskała podczas konferencji w Dartmouth w 1956 roku.
1952 Pierwsza obrabiarka sterowana numerycznie zademonstrowana w Stanach Zjednoczonych, w Massachusetts Institute of Technology (MIT). Późniejsze badania w MIT doprowadziły do opracowania języka APT (Automatically Programmed Tools) do programowania maszyn.
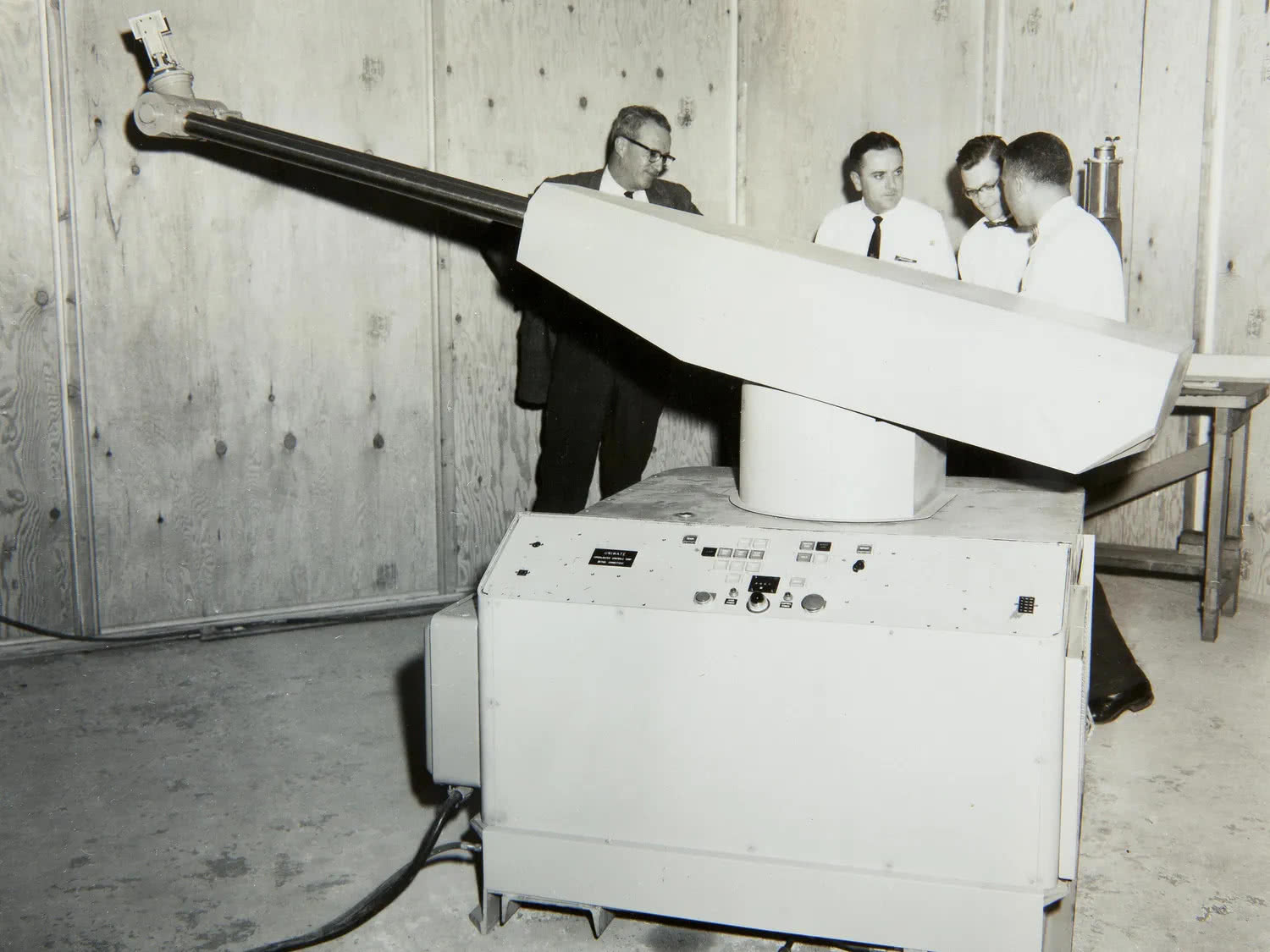
1954–61 George Devol tworzy pierwszego robota przemysłowego o nazwie Unimate (8). Wynalazek Devola przyniósł mu miano „dziadka robotyki” lub „ojca ramienia robotycznego”. Pierwszy robot przemysłowy oparty na maszynie Devola został zainstalowany w 1961 roku w celu rozładunku części z odlewni ciśnieniowej. Koncepcja ramienia robota ewoluowała z biegiem czasu dzięki wkładowi różnych osób i badaczy, a konstrukcja Devola i pochodne były wykorzystywane głównie w produkcji w przemyśle motoryzacyjnym. W rozwoju konstrukcji pomagał biznesmen Joseph F. Engelberger.
Razem założyli pierwszą korporację zajmującą się robotyką, Unimation, Inc.
1968 Opracowanie pierwszego programowalnego sterownika logicznego PLC, który zastąpił skomplikowane obwody przekaźnikowe w zakładach przemysłowych i w innych systemach (9). PLC został zaprojektowany tak, aby był łatwy do programowania przez inżynierów i techników, którzy byli już zaznajomieni z logiką przekaźników i schematami sterowania. Od samego początku sterowniki PLC były programowane przy użyciu języka drabinkowego, pomyślanego tak, by naśladować schematy obwodów sterowania, w których moc przepływa przez zamknięte styki, aby zasilić cewkę przekaźnika.

w przemyśle farmaceutycznym.
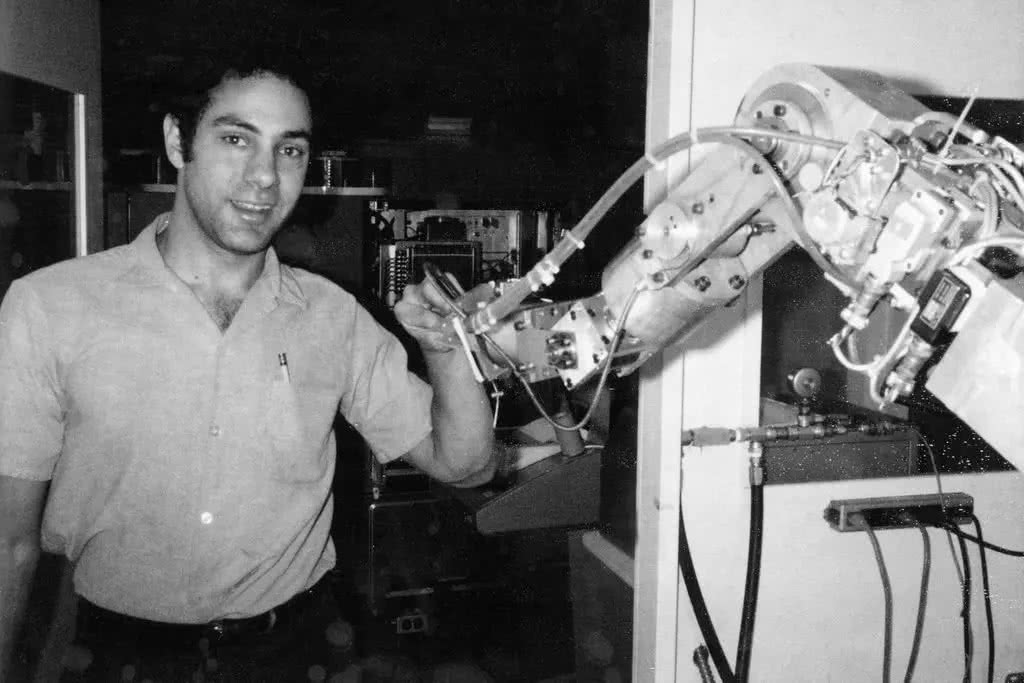
1969 Victor Scheinman, amerykański pionier robotyki, konstruuje Stanford Arm (10), w pełni elektrycznego robota przemysłowego o sześciu stopniach swobody. Ukształtowało to ścieżkę dla robotów, które mogły wykonywać bardziej złożone zadania, takie jak spawanie i montaż.
lata 70. XX wieku-do dziś Od zarania ery komputerowej trwa sukcesywne wdrażanie systemów komputerowych stopniowo automatyzujących kolejne obszary pracy i życia. W latach siedemdziesiątych zautomatyzowane, znane już wcześniej z hal produkcyjnych, wraz z ekspansją komputeryzacji, wkraczają do biur. To programy do obróbki danych, przetwarzania tekstów, obsługi klientów przy rosnącym poziomie automatyzacji prac i zadań. Od dekad trwa rozwój oprogramowania korporacyjnego, systemów zarządzania zasobami przedsiębiorstwa (ERP), automatyzacja procesów administracyjnych, księgowych, logistycznych. Postępuje automatyzacja procesów w rolnictwie, np. maszyny do zbioru plonów, w medycynie, np. roboty chirurgiczne. Rozwój autonomicznych pojazdów, dronów, robotów usługowych. Wprowadzane są roboty domowe, np. odkurzacze automatyczne. Kolejnym krokiem jest rozwój inteligentnych domów, systemów zarządzania energią, powszechne stosowanie urządzeń mobilnych, sieci bezprzewodowych, asystentów głosowych, systemów smart home. W ostatnich latach przyspieszył rozwój AI, uczenia maszynowego i automatyzacja coraz bardziej złożonych zadań. Wirtualni asystenci i chatboty wykorzystujące technologię Al stają się powszechne w obsłudze klienta i wsparciu technicznym. Wskutek pandemii covid-19 procesy te przyspieszyły.
Zastosowania automatyzacji
Przemysł
Automatyzacja w przemyśle zwiększa efektywność produkcji i przyczynia się do poprawy warunków pracy. Roboty zwykle przejmują często monotonne, powtarzalne zadania. Automatyzacja znalazła swoje miejsce przede wszystkim w produkcji masowej. W branżach takich jak samochodowa czy elektroniczna roboty przemysłowe wykonują skomplikowane czynności, zwiększając wydajność i precyzję. W przemyśle ciężkim, w stalowniach czy rafineriach, maszyny kontrolowane komputerowo mogą pracować w ekstremalnych, trudnych dla ludzi warunkach i wykonywać zadania wymagające dużej mocy i precyzji. W produkcji leków automatyzacja pozwala na monitorowanie każdego etapu produkcji, eliminując ryzyko ludzkich błędów i zapewniając jakość produktów. W dziedzinie logistyki i magazynowania roboty automatycznie sortują, przechowują i przygotowują produkty do wysyłki. Automatyzacja w transporcie skraca czas dostawy, redukując koszty. W produkcji mikroprocesorów czy układów scalonych automatyzacja pozwala na osiągnięcie poziomu precyzji niemożliwego do uzyskania przez człowieka. Nawet w rolnictwie wkracza na dużą skalę – samobieżne maszyny rolnicze obniżają koszty i skracają czas prac polowych.
Komunikacja
Jednym z najwcześniejszych praktycznych zastosowań automatyki była łączność telefoniczna. Pierwsze maszyny przełączające, wynalezione pod koniec XIX wieku, były prostymi przełącznikami mechanicznymi, które były zdalnie sterowane przez użytkownika telefonu naciskającego przyciski lub obracającego pokrętło na telefonie. Nowoczesne elektroniczne systemy przełączania telefonów oparte są na wysoce wyrafinowanych komputerach cyfrowych, które wykonują takie funkcje, jak monitorowanie tysięcy linii telefonicznych, określanie, które linie wymagają obsługi, przechowywanie cyfr każdego numeru telefonu podczas jego wybierania, konfigurowanie wymaganych połączeń, wysyłanie sygnałów elektrycznych w celu zadzwonienia na telefon odbiorcy, monitorowanie połączenia w trakcie jego trwania i rozłączanie telefonu po zakończeniu połączenia. Rozwiązania, rozwinięte w znacznym stopniu, znajdujemy w sieciach i w Internecie. Także komunikacja satelitarna nie byłaby możliwa bez zautomatyzowanych systemów naprowadzania, które umieszczają i utrzymują satelity na z góry określonych orbitach.
Branża usługowa, handlowa i finansowa
Od opieki zdrowotnej, przez bankowość i inne usługi finansowe po administrację rządową wszędzie wkroczyła automatyzacja. Także handel detaliczny odnotował szereg zmian w swojej działalności w wyniku automatyzacji. Instytucje bankowe i finansowe od dłuższego czasu stosują automatyzację w swoich operacjach – głównie za pomocą technologii komputerowej w celu ułatwienia przetwarzania dużych ilości dokumentów i transakcji finansowych. Banki wprowadziły systemy bankowości elektronicznej, np. bankomaty. Giełdy papierów wartościowych polegają na zautomatyzowanych systemach komputerowych.
Produkty codziennego użytku
Kuchenki mikrofalowe, pralki, suszarki, lodówki, magnetowidy i inne nowoczesne urządzenia gospodarstwa domowego zazwyczaj zawierają mikroprocesor, który działa jako komputerowy kontroler urządzenia. Konsument obsługuje urządzenie, programując sterownik do wykonywania wymaganych funkcji, w tym czasu (piekarniki, suszarki), poziomów mocy (kuchenki mikrofalowe), kanałów wejściowych (magnetowidy) i innych opcji cyklu (pralki). Także nowoczesny samochód jest przykładem wysoce zautomatyzowanego produktu konsumenckiego, zwykle wyposażony w układy mikroprocesorów, które obsługują różne funkcje, w tym sterowanie silnikiem (na przykład stosunek paliwa do powietrza), zegar, radio i tempomat.
M.U.






