Modelarskie serwa do zadań nietypowych
Ale czasy (i ceny serw) bardzo się zmieniły. Dziś serwa wykorzystuje się nie tylko do zmiany położenia sterów, czy przepustnicy modelarskiego silnika. Największymi ?psujami? serw ostatnimi czasy okazują się robotycy, choć i modelarze kartonowi też mają w tym swój udział (vide poprzednie wydanie Młodego Technika).
W grudniowym ?Na warsztacie? budowaliśmy kartonową makietę kolejową, po której jeździł równie kartonowy skład poruszany za pomocą magnesu, dzięki przerobionemu serwomechanizmowi. W tym artykule podam dwa przepisy na przeróbki serwomechanizmu na ruch ciągły - między innymi właśnie do takich zastosowań.
Jakie serwo?
?Serw ci u nas dostatek?? można by powiedzieć, ale w gąszczu pudełek na półkach modelarskich sklepów można się pogubić? Warto poznać podstawowe wiadomości dotyczące tych pożytecznych mechanizmów.
Zasadniczo serwomechanizmy modelarskie dzielimy ze względu na masę własną na:
- mikro (do 10 g),
- mini (do 20g),
- standard (do 50 g),
- duże (>50g - np. do podwozi makiet).
Od niedawna wyraźniej widoczny jest również podział ze względu na rodzaj sterowania:
- analogowe (dotychczas najpopularniejsze, tańsze, o mniejszym poborze prądu),
- cyfrowe (bardziej precyzyjne, z możliwością zaprogramowania innej pozycji neutralnej ale zwykle też zdecydowanie droższe ? co sprawia, że rzadko stosowane są jako napędowe).
Inne parametry serw istotne dla naszego celu to:
- maksymalny moment obrotowy (oznaczający masę w kg, jaką serwo jest w stanie podnieść na orczyku o długości 1 cm)
- prędkość kątowa
- pobór prądu (w mA ? informacja przydatna, gdy zamierzamy wykorzystywać serwa przy ograniczonym układzie BEC ? czasem mamy tylko max. 1-1,5 A)
Serwa są zasilane za pomocą dwóch przewodów (czerwony lub pomarańczowy to (+), czarny lub brązowy (-) i sterowane impulsowo przewodem żółtym.
Wybierając serwo do napędu robota, makiety czy innego, dowolnego modelu, należy przyjrzeć się uważnie jego momentowi, wymiarom i oczywiście ? cenie. Czasem uda nam się pozyskać taniej np. serwo częściowo uszkodzone (mechanicznie lub elektrycznie), które w zależności od naszych potrzeb, może być również wystarczająco dobre. Aktualnie nowe mikroserwa (czyli o masie ok. 8
gram) można już kupić w granicach dziesięciu złotych za sztukę (zwykle w tak zwanych wielopakach). Mocniejsze serwa, o standardowej wielkości i zdecydowanie większej sile uciągu, można znaleźć już od dwudziestu kilku złotych.
Wyroby mniej uznanych firm są zwykle znacznie tańsze niż markowe produkty o podobnych parametrach i takimi warto się zainteresować. Wśród konstruktorów robotów szczególnym uznaniem cieszą się standardowe mechanizmy typu SG-5010 (łożyskowane o momencie 6,5 kgcm) i MG-995 (z metalowymi zębatkami dwukrotnie większym uciągu). Z ?mikrusów? najczęściej wykorzystywane są MG-90 (1,6kgcm) i MG-09 (1,8kgcm, z metalowymi zębatkami). Choć zasada przerabiania mikroserw jest identyczna ? to jednak z uwagi na większe upakowanie i kłopoty z tym związane ? są trudniejsze do przerabiania. Do celów tego artykułu zdecydowałem się na wybór niezwykle popularnego mechanizmu SG-5010.
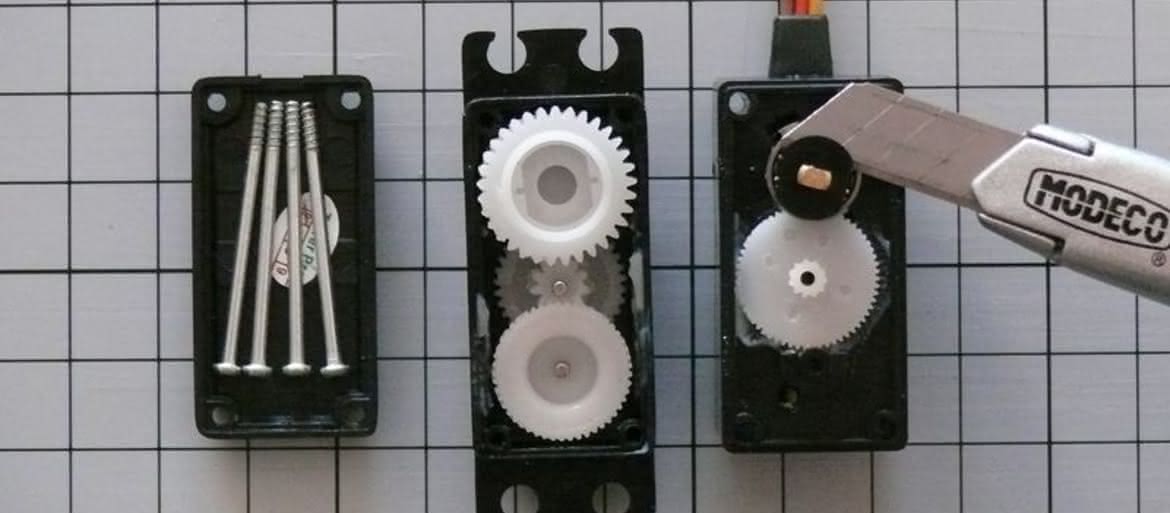
Jest pacjent - pora na operację
Zanim zaczniemy warto jeszcze zdecydować czy zależy nam na samym napędzie (silnik+przekładnia+obudowa) czy chcemy w miarę proporcjonalnie sterować prędkością przerobionego serwa za pomocą nadajnika RC lub komputerowych ew. ręcznych sterowników serw.
Mniejszej ingerencji wymaga przeróbka zamieniająca tylko sterowany ruch orczyka na ciągły. W tym przypadku dążyć będziemy jedynie do unieruchomienia potencjometru w pozycji środkowej, niezależnie od położenia orczyka. Jeśli z różnych przyczyn nie da się lub nie chcemy tego robić, zastępuje się potencjometr dwoma starannie dobranymi rezystorami. Niekiedy elektronikę wyprowadza się również poza obudowę, co pozwala na ew. korektę pozostawionego potencjometru (niestety przerobione mechanizmy nie chcą trwale trzymać neutrum, które trzeba często korygować bądź to trymerem w aparaturze bądź właśnie potencjometrem z serwa. W niektórych przypadkach (szczególnie w mikroserwach) konieczne jest zastąpienie potencjometru dwoma idealnie równymi rezystorami o łącznym oporze równym potencjometrowi.
W drugim przypadku ? kiedy zależy nam głównie na silniku z przekładnią - z obudowy serwa wylatuje cała elektronika ? pozostaje sam napęd. W tym przypadku potrzebna jest zazwyczaj większa ingerencja a później również nowe sterowanie obrotami silnika.
Szczegóły operacji obu rodzajów szczegółowo opisane są pod kolejnymi ilustracjami.
Tak przerobione serwa mają tysiące zastosowań ? trudno je tutaj nawet pokrótce wymienić. Na pewno wciąż można też znaleźć nowe? Mam nadzieję, że Czytelnicy również znajdą dla nich swoje. Liczę na to, jak również na relacje na internetowym forum Młodego Technika. Do zobaczenia!