Jak działa system jazdy bez kierowcy
ABS Anti-Lock Braking System. Układ stosowany w pojazdach mechanicznych, zapobiegający blokowaniu kół
ACC Adaptive Cruise Control. Urządzenie utrzymujące odpowiedni, bezpieczny odstęp między poruszającymi się pojazdami samochodowymi
AD Automated Driving. Zautomatyzowany system prowadzenia samochodu - termin używany przez firmę Mercedes
ADAS Advanced Driver Assistance System. Zaawansowany system wsparcia kierowcy (np. rozwiązania Nvidia)
ASCC Advanced Smart Cruise Control. Oparty na radarach adaptacyjny układ kontroli prędkości jazdy
AVGS Automatic Vehicle Guidance System. System zautomatyzowanego nadzoru i prowadzenia samochodu (np. na parkingu)
DIV Driverless Intelligent Vehicles. Inteligentne samochody bez kierowców
ECS Electronic Components and Systems. Ogólna nazwa elektronicznego wyposażenia
IoT Internet of Things. Internet rzeczy
ITS Intelligent Transportation Systems. Inteligentne systemy transportowe
LIDAR Light Detection and Ranging. Urządzenie działające na podobnej zasadzie jak radar - stanowi połączenie lasera z teleskopem.
LKAS Lane Keeping Assist System. System utrzymywania pojazdu na pasie ruchu
V2I Vehicle-to-Infrastructure. Komunikacja "pojazd-infrastruktura"
V2V Vehicle-to-Vehicle. Komunikacja "pojazd-pojazd"
Plan obejmuje m.in. stworzenie infrastruktury do obsługi komunikacji między pojazdami; dla tych potrzeb zwolniona zostanie częstotliwość 700 MHz.
Informacja ta nie tylko pokazuje, że Niemcy poważne podchodzą do rozwoju motoryzacji bez kierowców. Przy okazji uświadamia bowiem, że auta bez kierowców to nie tylko same pojazdy, supernowoczesne, naszpikowane czujnikami i radarami maszyny, lecz całe systemy administracyjno-infrastrukturalno-komunikacyjne. Wprowadzanie do ruchu pojedynczego pojazdu miałoby niewielki sens.
Bardzo wiele danych
Działanie systemu automatycznej jazdy wymaga od układu czujników i procesorów (1) szybkości detekcji, przetwarzania danych i reakcji. Wszystko to musi dziać się paralelnie w milisekundowych przedziałach czasu. Kolejny wymóg stawiany sprzętowi to niezawodność i wysoka czułość.
Kamery np. muszą mieć wysokie rozdzielczości, w celu rozpoznawania drobnych szczegółów. Ponadto wszystko to musi być trwałe, odporne na różne warunki, temperatury, wstrząsy i ewentualne uderzenia.
Nieuchronną konsekwencją wprowadzania aut bez kierowców jest stosowanie technologii Big Data, czyli pozyskiwania, filtrowania, oceny i segregowania olbrzymich ilości danych w krótkim czasie. W dodatku systemy muszą być bezpieczne, odporne na ataki i ingerencje z zewnątrz, które mogłyby prowadzić do wielkich katastrof.
Auta bez kierowców wyjadą tylko na specjalnie w tym celu przygotowane drogi. Nie ma mowy o zamazanych i niewidocznych liniach na jezdni. Inteligentne technologie komunikacji - Vehicle-to-Vehicle (pojazd-pojazd) oraz Vehicleto- Infrastructure (pojazd-infrastruktura), znane też jako V2V oraz V2I, umożliwiają wymianę informacji pomiędzy poruszającymi się pojazdami oraz otoczeniem autostrady.
Właśnie w nich naukowcy i projektanci widzą znaczny potencjał, jeśli chodzi o rozwój samochodów autonomicznych. W V2V używa się częstotliwości 5,9 GHz, wykorzystywanej również w Wi-Fi, w paśmie 75 MHz o zasięgu 1000 m. Komunikacja V2I jest czymś znacznie bardziej złożonym i nie polega jedynie na bezpośredniej komunikacji z elementami infrastruktury drogowej.
Jest to całościowe wkomponowanie i przystosowanie pojazdu do poruszania się i współpracy z całością systemu zarządzania ruchem. Zwykle pojazd, który sam się prowadzi, zostaje wyposażony w kamery, radary, specjalne czujniki, za pomocą których "postrzega" i "wyczuwa" świat zewnętrzny (2).
Do pamięci załadowuje mu się szczegółowe mapy, dokładniejsze niż tradycyjna nawigacja samochodowa. GPS-owy system nawigacji w pojazdach bez kierowców musi być wyjątkowo precyzyjny. Liczy się dokładność do kilkunastu centymetrów. W ten sposób auto trzyma się pasa.
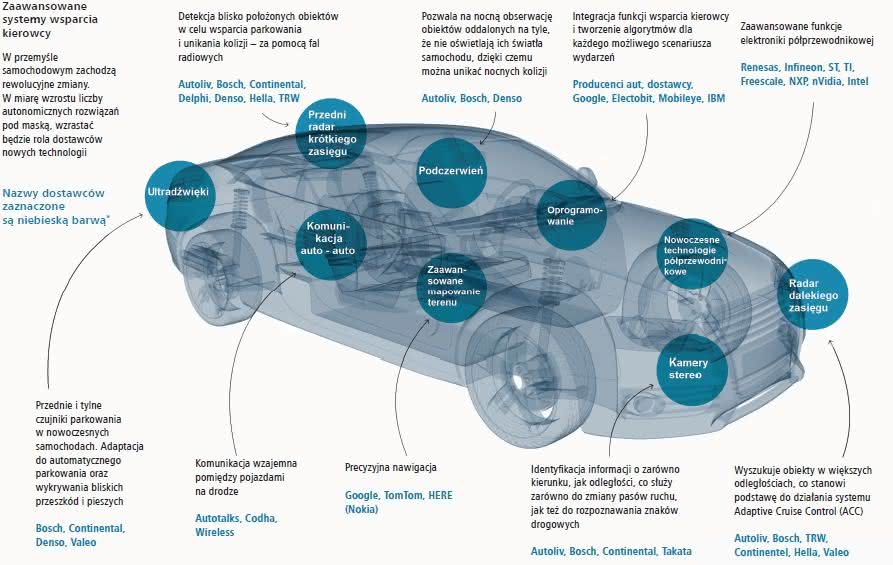
Świat czujników i superdokładnych map
Za to, aby auto samo trzymało się drogi, odpowiada układ czujników. Na bokach przedniego zderzaka są też zwykle umieszczane dwa dodatkowe radary, które wykryją inne pojazdy, nadjeżdżające z obu stron na skrzyżowaniu. W rogach nadwozia montuje się cztery lub więcej innych czujników do tropienia ewentualnych przeszkód.
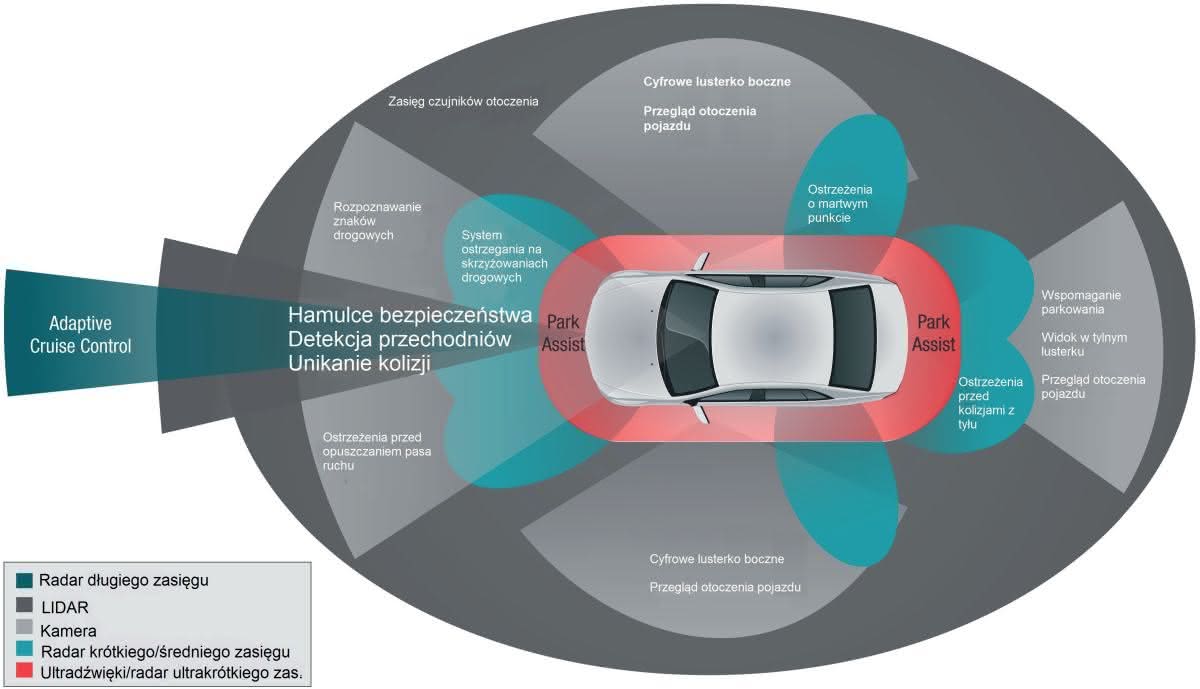 2. Co widzi i czuje wóz autonomiczny
2. Co widzi i czuje wóz autonomicznyKamera z przodu, o kącie widzenia 90 stopni, rozpoznaje kolory, więc odczyta sygnalizację świetlną i znaki drogowe. Czujniki odległości w samochodach pomogą utrzymać odpowiednią odległość od innych pojazdów na drodze.
Również dzięki radarowi samochód zachowa odpowiedni dystans do innych pojazdów. Jeśli w odległości 30 m nie wykryje innych aut, będzie mógł zwiększyć prędkość.
Inne czujniki pomogą wyeliminować tzw. martwe punkty na trasie oraz wykryją obiekty w odległości porównywalnej z długością dwóch boisk piłkarskich w każdym kierunku. Technologia bezpieczeństwa będzie szczególnie przydatna na ruchliwych ulicach i skrzyżowaniach. Aby jeszcze lepiej uchronić pojazd przed kolizją, jego maksymalna prędkość zostanie ograniczona do 40 km/godz.
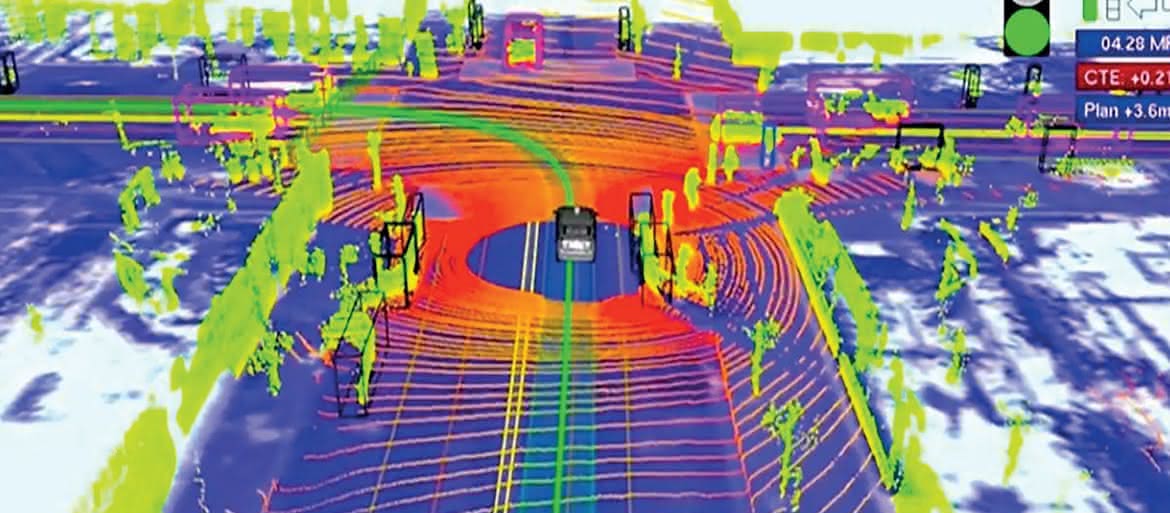
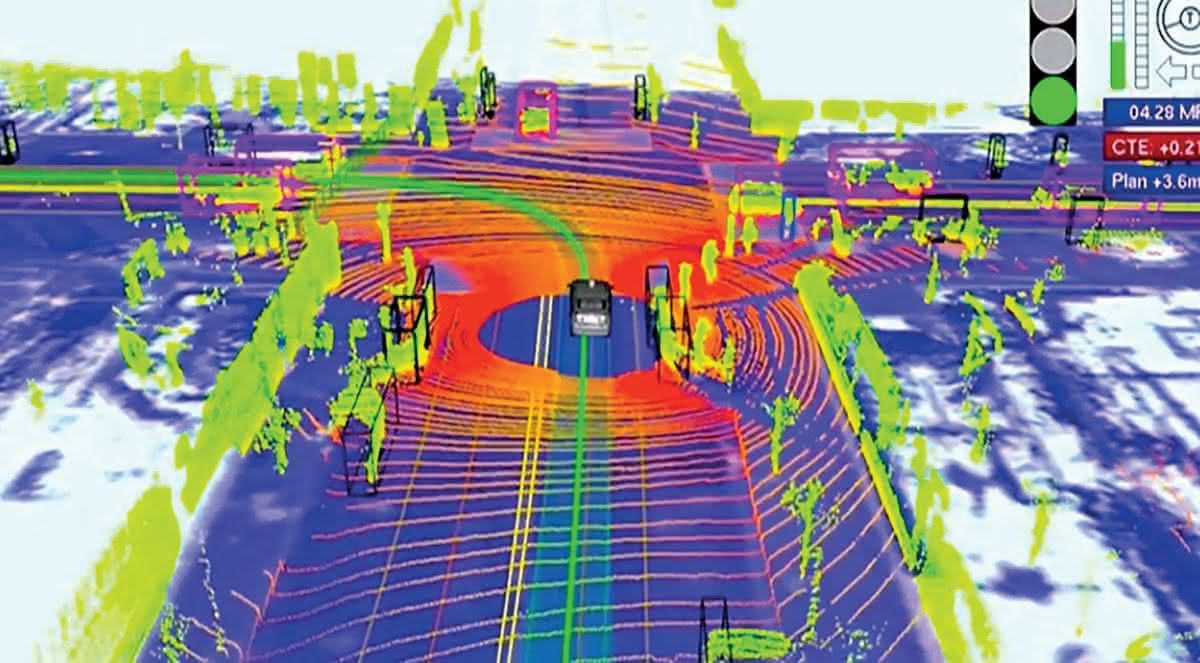
W samochodzie bez kierowcy stworzonym przez Google’a sercem i najważniejszym elementem konstrukcji jest 64-wiązkowy laser Velodyne, zamontowany na dachu pojazdu. Urządzenie bardzo szybko wiruje, więc pojazd "widzi" obraz obejmujący 360 stopni wokół.
W ciągu sekundy rejestrowanych jest 1,3 miliona punktów wraz z ich odległością i kierunkiem ruchu. W ten sposób powstaje model świata w 3D, który system porównuje z mapami w wysokiej rozdzielczości. Dzięki temu tworzone są trasy, za pomocą których samochód unika przeszkód i przestrzega zasad ruchu drogowego.
Dodatkowo system dostaje informacje od czterech radarów z przodu i tyłu pojazdu, które określają położenie innych pojazdów i obiektów, mogących niespodziewanie znaleźć się na drodze. Kamera umieszczona obok wstecznego lusterka wyłapuje światła i znaki drogowe, a GPS o zwiększonej precyzji stale śledzi położenie pojazdu.
Jego działanie uzupełnia bezwładnościowy system, przejmujący śledzenie położenia wszędzie tam, gdzie nie dociera sygnał GPS - w tunelach, między wysokimi budynkami czy na parkingach. Do jazdy samochodu używane są m.in. obrazy zgromadzone podczas tworzenia bazy udostępnionej jako Google Street View - to szczegółowe zdjęcia ulic miast z 48 krajów świata.
Oczywiście to nie wystarcza do bezpiecznej jazdy i trasy, którymi jeżdżą samochody Google’a (głównie w stanach Kalifornia i Nevada, gdzie dopuszcza się na określonych warunkach ruch aut bez kierowcy), są wcześniej dokładnie rejestrowane podczas specjalnych przejazdów. Auta Google’a pracują aż na czterech warstwach danych wizualnych.
Dwie z nich to superdokładne modele okolicy, po której porusza się pojazd. Trzecia zawiera dokładną mapę dróg. Czwarta zaś - dane porównujące stałe elementy krajobrazu z ruchomymi (3). Do tego dochodzą algorytmy wynikające z psychologii ruchu drogowego, np. sygnalizowanie nieznacznym podjeżdżaniem, że chce się przejechać skrzyżowanie.
Być może w całkowicie zautomatyzowanym systemie drogowym przyszłości, bez ludzi, którym trzeba dawać coś do zrozumienia, okaże się to zbędne, a pojazdy poruszać się będą według z góry przyjętych i ściśle opisanych algorytmami reguł.
Poziomy automatyzacji
Poziom automatyzacji samochodu ocenia się według trzech fundamentalnych kryteriów. Pierwsze z nich odnosi się do zdolności przejęcia przez system kontroli nad pojazdem, zarówno podczas jazdy do przodu, jak w trakcie manewrów. Drugie kryterium jest związane z człowiekiem w pojeździe i z jego możliwością zajęcia się czymś innym niż kierowanie pojazdem.
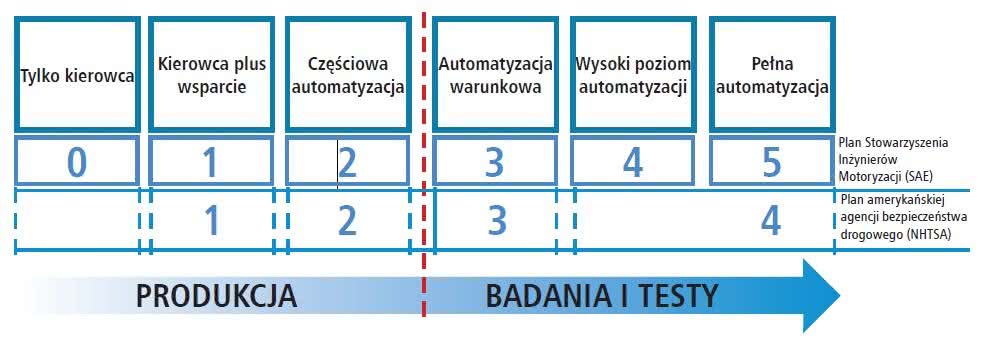
Trzecie kryterium obejmuje zachowanie samego pojazdu i jego zdolności do "zrozumienia" tego, co zachodzi na drodze. Międzynarodowe Stowarzyszenie Inżynierów Motoryzacji (SAE International) automatyzację pojazdu drogowego klasyfikuje na sześciu poziomach.
W zakresie automatyzacji od 0 do 2 głównym czynnikiem odpowiedzialnym podczas jazdy jest człowiek-kierowca (4). Najnowocześniejsze rozwiązania na tych poziomach obejmują m.in. aktywny tempomat (Adaptive Cruise Control - ACC), opracowany przez firmę Bosch i coraz częściej stosowany w luksusowych pojazdach.
W przeciwieństwie do tradycyjnego tempomatu, wymagającego od kierowcy stałej kontroli odstępu od poprzedzającego pojazdu, wykonuje on także tę minimalną część pracy za kierowcę. Szereg czujników, radarów oraz sprzężenie ich ze sobą oraz innymi układami auta (m.in. napędowym, hamulcowym) sprawia, że auto wyposażone w ACC samodzielnie utrzymuje nie tylko zadaną prędkość podróżną, ale także bezpieczny odstęp od poprzedzającego auta.
W razie potrzeby układ przyhamuje samochód i samodzielnie zmniejszy prędkość, by uniknąć najechania na tył poprzedzającego pojazdu. Gdy sytuacja na drodze się ustabilizuje, auto z powrotem przyspieszy do zadanej prędkości.
Urządzenie jest bardzo przydatne na autostradzie i zapewnia zdecydowanie wyższy poziom bezpieczeństwa niż tradycyjny tempomat, który nieumiejętnie stosowany może być bardzo niebezpieczny. Innym zaawansowanym rozwiązaniem wykorzystywanym na tym poziomie jest LDW (Lane Departure Warning, Lane Assist) - system aktywny, mający na celu zwiększenie bezpieczeństwa jazdy samochodem przez ostrzeganie przed niezamierzonym zjechaniem z własnego pasa ruchu.
Oparty jest na analizie obrazu - kamera sprzężona z komputerem śledzi znaki ograniczające pas ruchu i we współpracy z różnymi czujnikami ostrzega kierowcę (np. wibracją fotela) o zmianie pasa niepoprzedzonej włączeniem kierunkowskazu.
Na wyższych poziomach automatyzacji, od 3 do 5, wprowadzane są stopniowo kolejne rozwiązania. Poziom 3 określany jest jako "automatyzacja warunkowa" (conditional automation). Pojazd uzyskuje wówczas wiedzę, czyli zbiera dane o otoczeniu.
Założony czas koniecznej reakcji człowieka-kierowcy wydłuża się w tej opcji do kilku sekund, podczas gdy na niższych poziomach była to najwyżej sekunda. System pokładowy sam bowiem kieruje autem i tylko w razie konieczności powiadamia człowieka o niezbędnej interwencji.
Ten jednak generalnie może zająć się czymś innym, np. czytaniem lub oglądaniem filmu, będąc gotowym do przejęcia steru wozu wyłącznie w razie potrzeby . Na poziomach 4 i 5 założony czas reakcji człowieka wydłuża się do kilku minut, gdyż pojazd zyskuje zdolność do samodzielnych reakcji przez cały przebieg drogi.
Człowiek może wówczas całkowicie przestać interesować się kierowaniem i np. pójść spać. Przedstawiona klasyfikacja SAE jest też niejako planem automatyzacji samochodów. Nie jedynym. Amerykańska agencja bezpieczeństwa drogowego (NHTSA) używa bowiem podziału na pięć poziomów, od całkowicie zależnego od człowieka - 0, po całkowicie zautomatyzowany - 4.