Ewolucja robotów
Kilka miesięcy temu inżynierowie z Uniwersytetu Cornella stworzyli syntetyczny materiał, który wykazuje trzy kluczowe cechy życia – metabolizm, zdolność samomontażu i i samoorganizację. Nazwali swój proces DASH (DNA-based Assembly and Synthesis of Hierarchical materials). Celem naukowców nie jest jednak wcale skonstruowanie sztucznej formy życia, ale maszyny o właściwościach podobnych do żywej istoty.
Główną innowacją jest tutaj zaprogramowany metabolizm. Zestaw instrukcji dotyczących metabolizmu i autonomicznej regeneracji pozwala materiałowi rozwijać się samoistnie. Naukowcy opisują metabolizm jako system, za pomocą którego "materiały składające się na życie są syntetyzowane, łączone, rozpraszane i rozkładane autonomicznie w kontrolowany, hierarchiczny sposób, z wykorzystaniem procesów biologicznych".
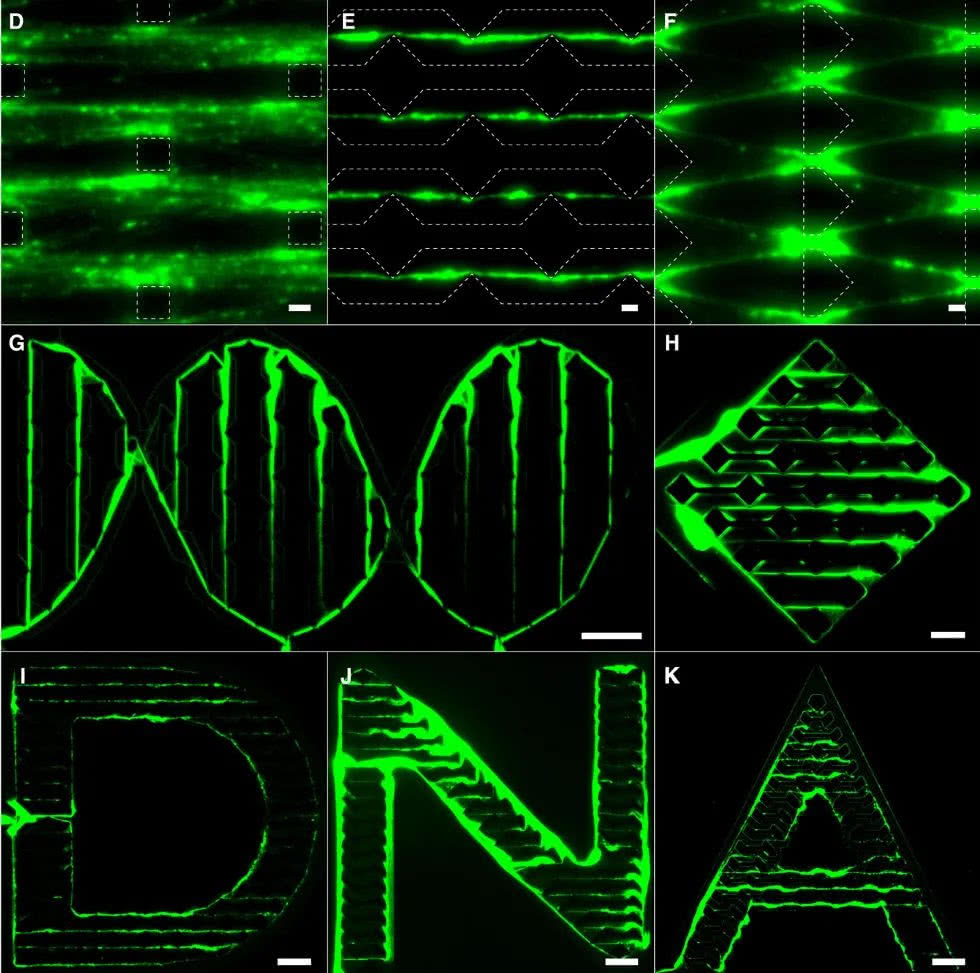
Aby tak postępować, żywy organizm musi być w stanie generować nowe komórki, odrzucając stare oraz odpady. To właśnie ten proces naukowcy z Cornella powielają za pomocą DASH (1). Opracowali biomateriał, który jest w stanie powstać samoistnie z bloków konstrukcyjnych w nanoskali. Może najpierw ułożyć się w polimery, a potem w większe kształty.
Cząsteczki DNA w materiale uległy powieleniu setki tysięcy razy, w wyniku czego stworzyły się łańcuchy powtarzającego się DNA o długości kilku milimetrów. Roztwór wstrzykiwano do specjalnego urządzenia z mikroprzepływem, co ułatwiało biosyntezę. Materiał ten miał nawet własną mobilność - gdy przedni koniec narastał, "ogon" ulegał degradacji, co prowadziło do "pełzania".
- Nasze projekty są wciąż prymitywne, ale pokazały nową metodę tworzenia dynamicznych maszyn z biomolekuł. Jesteśmy na pierwszym etapie budowania realistycznych robotów ze sztucznym metabolizmem - wyjaśnia Shogo Hamada, główny autor pracy, na stronie Uniwersytetu Cornella. - Nawet jednak w prostym projekcie byliśmy w stanie stworzyć wyrafinowane zachowania, takie jak wyścigi organizmów i rywalizację.
Teraz inżynierowie zastanawiają się, jak sprawić, aby system reagował na bodźce i był w stanie samodzielnie poszukiwać światła lub żywności. Chcą również, aby umiał unikać tego, co mu szkodzi. Czymże to jest, jeśli nie robotyczną ewolucją?
Robotyczne ćwiczenia z Darwina
Pojęcia ewolucji robotów i uczenia maszynowego są pokrewne. W przypadku maszyn, w odróżnieniu od biologii, postępy są tak szybkie, że zanika różnica między nauką nowych umiejętności a ewolucją przeobrażającą całą konstrukcję - zwłaszcza, gdy robot uczy się samemu rozbudowywać i modyfikować własne "ciało" w celu lepszego wykonywania zadań.
W serii eksperymentów przeprowadzonych jeszcze w 2010 r. naukowcy Dario Floreano ze Szkoły Politechnicznej w Lozannie i Laurent Keller z tamtejszego uniwersytetu udowodnili, że poruszające się na kołach roboty - o imionach Khepera i Alice - są w stanie w ciągu mniej więcej stu "pokoleń" rozwinąć umiejętności np. bezkolizyjnej jazdy.
Analogia z biologiczną ewolucją jest tu dość trafna, bowiem sieci neuronowe kontrolujące pracę tych maszyn były modyfikowane w sposób przypadkowy, przez doświadczenia zbierane w trakcie eksperymentów. Najlepiej spisujące się w manewrowaniu roboty selekcjonowano (co imitowało dobór naturalny) do tworzenia następnego "pokolenia". Dobierano je w pary, a ich sieci neuronowe łączyły się i przechodziły jako "dziedzictwo" do następnej generacji. Po stu takich "zmianach pokoleniowych".
Również na zasadzie "pokoleniowej" działa system skonstruowany przez specjalistów z ETH w Zurichu i z Uniwersytetu w Cambridge. Stworzyli oni system robotyczny, który jest zdolny do "ewolucji" i doskonalenia samego siebie. W praktyce wygląda to tak, że duże ramię robota buduje swoje "dzieci", czyli mniejsze urządzenia, które następnie obserwuje i na podstawie tych obserwacji wnioskuje, co trzeba poprawić w kolejnej generacji robotów.
Opisany w magazynie "PLOS One" demonstracyjny system składa się ze wspomnianego ramienia-matki oraz minirobotów montowanych z plastikowych kostek, z niewielkim silnikiem w środku. System rejestruje postępy "dzieci" i w kolejnym budowanym przez ramię "pokoleniu" poprawia niedoskonałości konstrukcji, dzięki czemu potomstwo porusza się sprawniej i przemierza większy dystans. Zgodnie z założeniami systemu, "matka" tworzy w ten sposób dziesięć pokoleń "dzieci"-robotów, a finalny produkt spisuje się dwa razy lepiej niż pierwszy, np. pokonuje dwukrotnie dłuższą drogę.
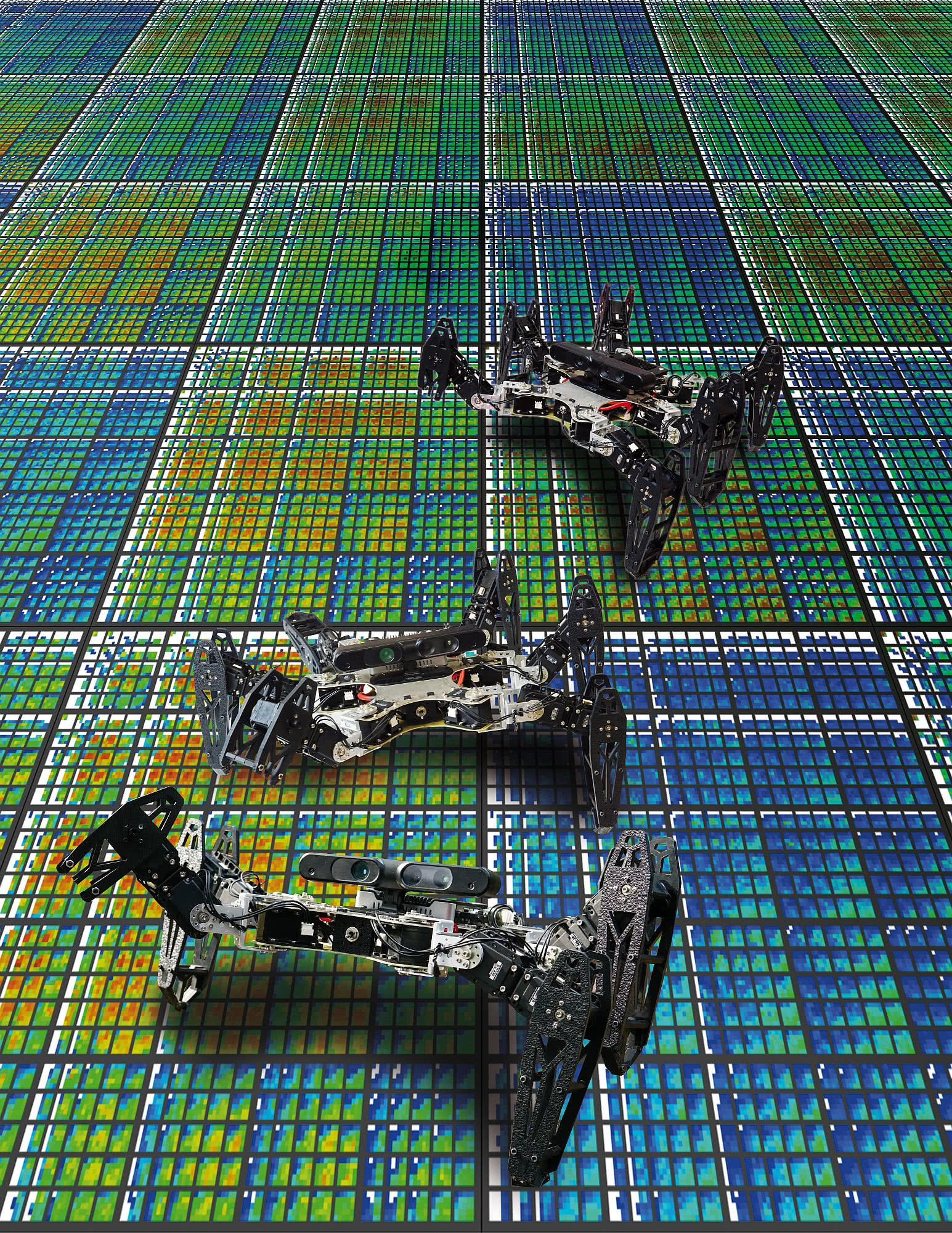
Robota, który potrafi w ciągu ok. 2 minut "dojść do siebie" po uszkodzeniach i powrócić do wykonywania swoich zadań mimo częściowej niesprawności, zaprezentowali konstruktorzy z francuskiego Uniwersytetu Piotra i Marii Curie.
Algorytm odpowiadający za te nowe możliwości maszyny nazwano Intelligent Trial and Error (2). Prezentowany przez konstruktorów sześcionogi robot potrafi pomimo uszkodzenia obu nóg iść dalej. W innym przykładzie algorytmu widzimy robota uczącego się, jak prawidłowo umieścić przedmiot, gdy uszkodzonych zostało kilka z jego silników, służących do napędzania części ruchomych. Autorzy algorytmu twierdzą, że inspirowali się mechanizmami adaptacyjnymi zaobserwowanymi w przyrodzie.
Podobny projekt podjęli Josh Bongard, Viktor Zykov i Hod Lipson z Uniwersytetu Cornella, którzy uważają, że aby maszyna mogła samodzielnie radzić sobie w zróżnicowanych sytuacjach, musi mieć możliwość analizowania nie tylko otoczenia, ale też samej siebie. Skonstruowali małego czteronożnego robota Starfish (3), programując go w nietypowy sposób. Do jego pamięci wprowadzono informacje, z jakich części się składa, w wyniku czego musiał wytworzyć wewnętrzny model swojego "ciała".

Robot, poruszając silnikami, sprawdzał, w jaki sposób poszczególne ruchy wpływają na wzajemne położenie części i w ten sposób nauczył się, jak korzystać ze swoich członków. Potem przyszedł czas na naukę chodzenia. Zadanie robota polegało na przemieszczeniu się w określonym kierunku, przy czym to do maszyny należało zaplanowanie sekwencji ruchów. Robot poradził sobie, chociaż nie można powiedzieć, żeby poruszał się sprawnie i z gracją. Następnie eksperymentatorzy utrudnili mu zadanie... odkręcając jedną z nóg. Maszyna musiała zastąpić jakoś ten ubytek i również tym razem sprostała wyzwaniu - w dodatku znacznie szybciej niż trwałaby nauka chodzenia od nowa.
Zamiast zwykłej nauki nowych zadań - wprowadzanie do robota motywacji do rozwoju, aby mógł pokonywać nowe problemy i ewoluować. Tak można by opisać projekt prowadzony przez francuskich naukowców z paryskiego Instytutu Systemów Inteligentnych i Robotyki (ISIR). Stworzony przez nich robot Creadapt ma zostać wyposażony w specjalny algorytm pozwalający na "rozwój" w nowych sytuacjach.
Sześcionogi Creadapt na płaskim, pozbawionym nierówności terenie może jechać na kołach, a w trudniejszych warunkach ma zamieniać koła na inny sposób poruszania się, bardziej odpowiedni do podłoża. Robot sam ma podejmować decyzje i "wiedzieć", kiedy zmienić technikę oraz rodzaj odnóży. To jest właśnie istota projektu - algorytm, nad którym pracują Francuzi. Maszyna powinna samodzielnie znaleźć optymalne rozwiązanie, inaczej mówiąc: sama się przystosować, "wyewoluować" najlepszą technikę w danej sytuacji.
Robocie potomstwo
Ostatecznym celem badaczy jest zaprojektowanie sztucznej inteligencji robotów, tak by potrafiły analizować swój własny kod źródłowy i współpracować z innymi poprzez łączenie bitów i fragmentów kodu z kodem innych maszyn. W ten sposób można by stworzyć "potomstwo", podobnie jak w przypadku życia organicznego.
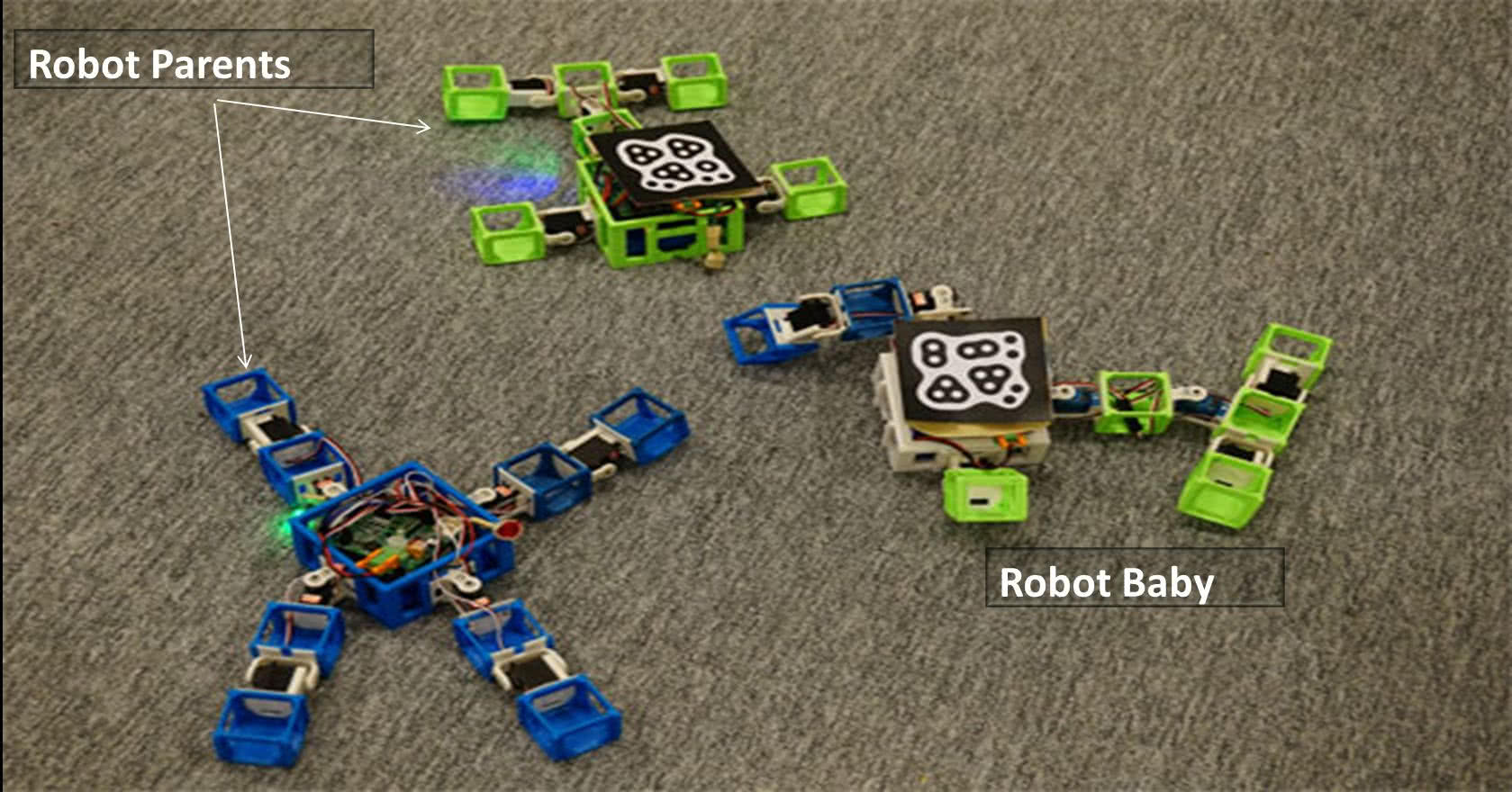
Informatycy z Vrije Universiteit Amsterdam zbudowali uproszczony system, który pokazuje, w jaki sposób przyszłe roboty mogą wymieniać i łączyć swoje "genetyczne" informacje. Ich ostatnie badania, opisane w czasopiśmie "Nature Machine Intelligence", obejmowały programowanie dwóch robotów rodzicielskich w określonych kolorach, w celu zakodowania nowego "potomstwa". Eksperymenty wykazały, że powstałe w ten sposób "dzieci" zawierają mieszankę kodu (i barw modułów) rodziców, jak również niektóre moduły, które wydawały się mutować lub mieszały się autonomicznie (4).
Mirosław Usidus