Liniowe silniki elektryczne
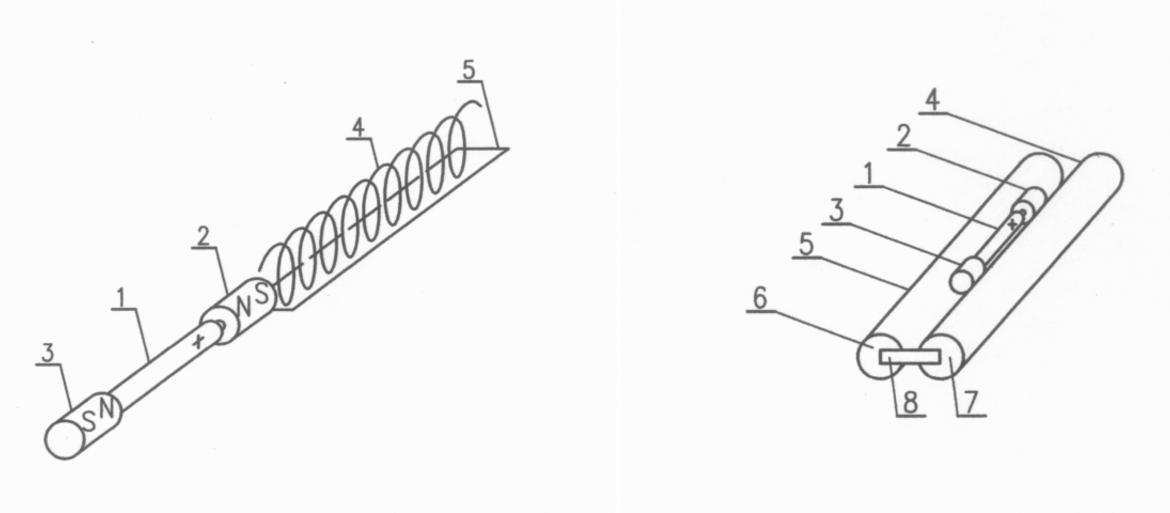
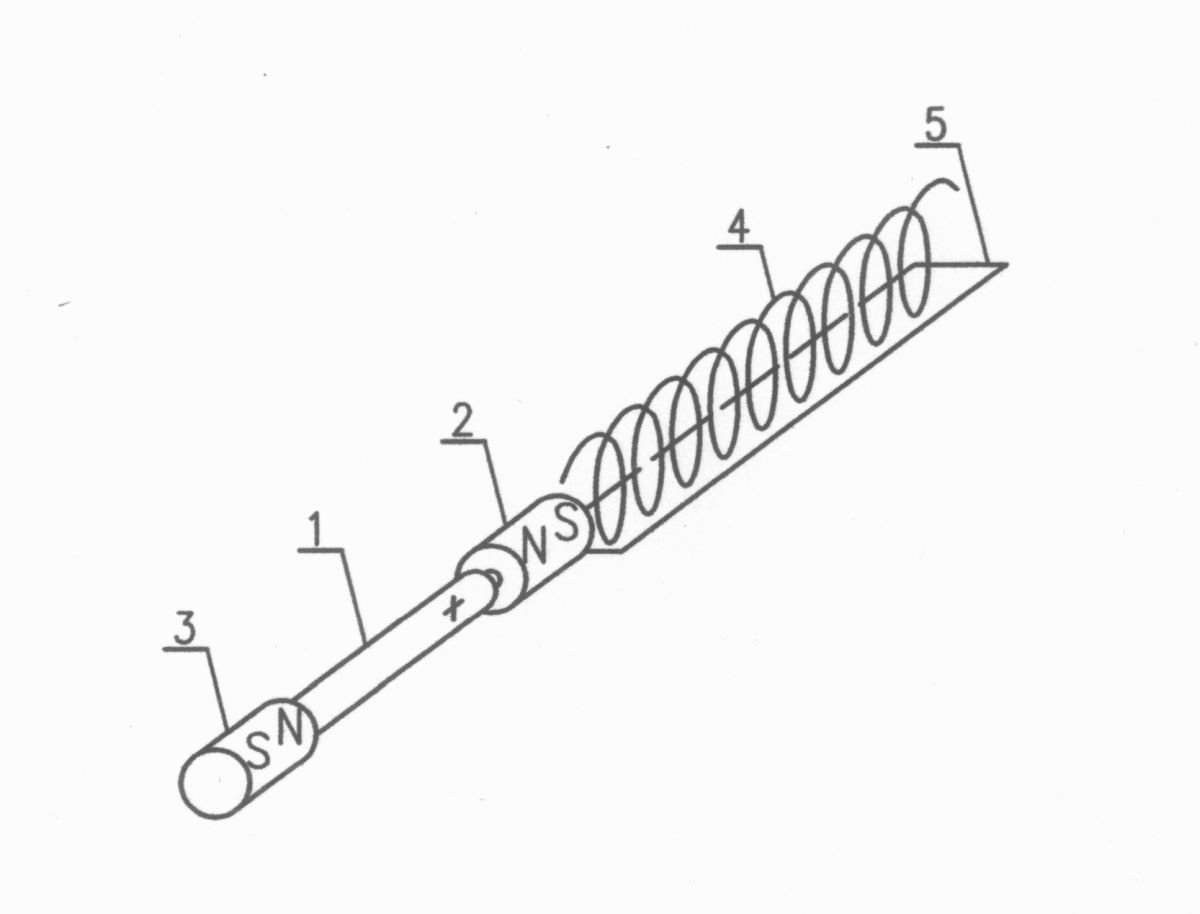
2, 3 - walcowe magnesy neodymowe; 4 - spirala z miedzianego drutu bez izolacji; 5 - linijka lub listewka;
N, S - bieguny magnesów.
Charakterystyczną cechą liniowych silników elektrycznych jest to, że zamiana energii prądu na energię kinetyczną ruchu postępowego zachodzi bez jakichkolwiek pośredniczących elementów mechanicznych, takich jak koła zębate, zębatki czy mechanizmy korbowe. Dzięki temu silniki te mają bardzo prostą konstrukcję i wyróżniają się dużą niezawodnością.
Dlatego też, do przeprowadzenia opisanych dalej doświadczeń będziemy potrzebowali niewiele materiałów i narzędzi. Wystarczy kilka magnesów neodymowych, w kształcie walca, pokrytych ochronną warstwą niklu, kilkanaście metrów miedzianego drutu, okrągłe baterie alkaliczne (typu "paluszek") i kawałki prętów z materiału izolacyjnego.
Najprostszy liniowy silnik elektryczny
W celu zbudowania silnika, na okrągłym pręcie o większej średnicy o 1-2 mm niż średnica magnesów neodymowych nawijamy od kilkudziesięciu do kilkuset zwojów miedzianego drutu o średnicy 0,5-1 mm bez izolacji. Zwoje muszą być nawijane równo jeden obok drugiego - nie mogą się krzyżować. Najłatwiej zastosować drut pokryty cienką warstwą srebra, używany do połączeń w układach elektronicznych, czyli srebrzankę. Jeżeli takiej nie mamy, to z drutu izolowanego usuwamy emalię za pomocą papieru ściernego. Dla ułatwienia można wcześniej ogrzać drut do czerwoności w płomieniu palnika lub kuchenki gazowej.
przez odcinek spirali w najprostszym liniowym silniku
elektrycznym:
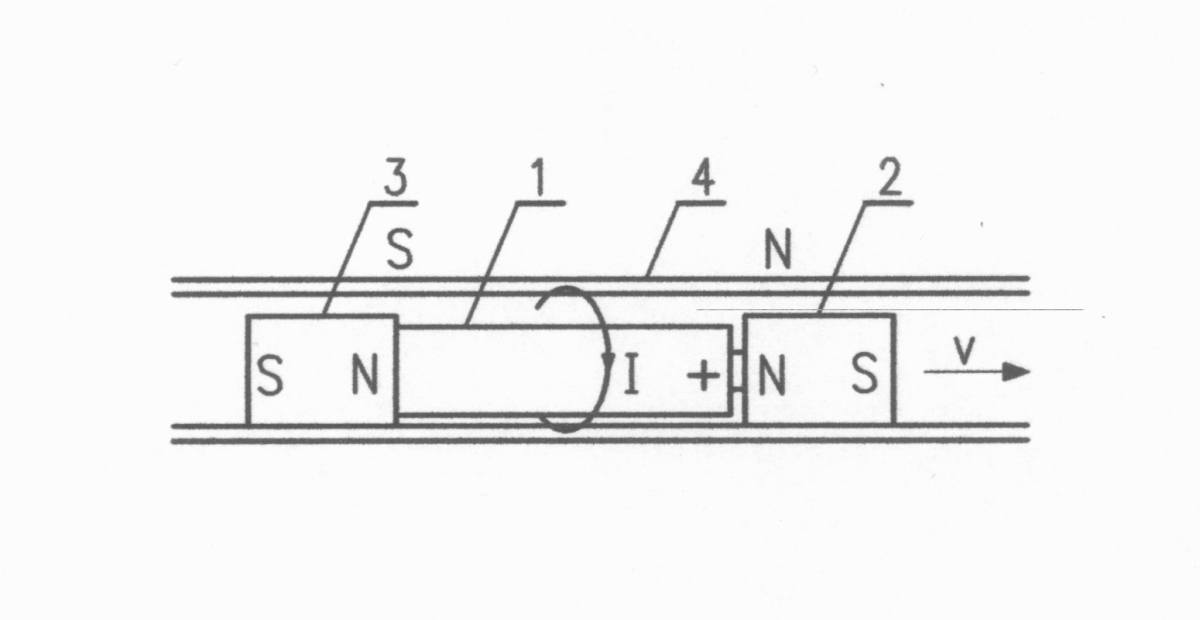
cyfry 1-4 oznaczają takie same elementy, jak na rys. 1.
Nawinięty drut zsuwamy z pręta, otrzymując spiralę o lekko rozsuniętych zwojach, które nie mogą dotykać do siebie (rys. 1). Spiralę można przykleić od dołu kawałkami taśmy samoprzylepnej do linijki lub listewki. Do końców okrągłej baterii przykładamy po jednym magnesie neodymowym w kształcie walca. Średnica magnesów musi być o 1-2 mm większa, niż średnica baterii i muszą być one zwrócone do baterii biegunami jednoimiennymi. Z magnesami neodymowymi, które są bardzo silne, należy obchodzić się ostrożnie, ponieważ mogą boleśnie ścisnąć skórę palców lub ulec pęknięciu po uderzeniu o siebie.
Gotowy silnik przedstawia fot. 1. Żeby go uruchomić, wsuwamy całkowicie baterię z magnesami do spirali (magnesy i baterię będziemy dalej dla ułatwienia nazywali wózkiem). Zauważymy wówczas, że wózek zostanie albo wypchnięty ze spirali, albo wciągnięty i ... wyjedzie z niej drugim końcem. Gdyby wózek był wypychany, należy go odwrócić i wsunąć do spirali drugim końcem.

Dlaczego to działa?
Wyjaśnimy teraz, dlaczego nasz niezwykle prosty silnik zachowuje się w taki zadziwiający sposób? Popatrzmy na rys. 2. Po wsunięciu wózka do spirali, prąd elektryczny płynie od dodatniego bieguna baterii przez przyłożony do niego magnes (a właściwie jego niklową powłokę), zwoje spirali zawarte między magnesami do drugiego magnesu - przyłożonego do bieguna ujemnego. Fragment spirali między magnesami staje się solenoidem, przez który płynie prąd.
Solenoid ten ma dwa bieguny magnetyczne, które oddziałują z biegunami magnesów neodymowych. Co prawda, mamy tu dość skomplikowany układ w sumie sześciu biegunów, między którymi zachodzi zarówno przyciąganie, jak i odpychanie, decydujące znaczenie ma jednak oddziaływanie najbliższych biegunów solenoidu i magnesów, dla których siły mają największą wartość (rys. 3). W wyniku tego na wózek działa siła wypadkowa, powodująca jego przesuwanie.
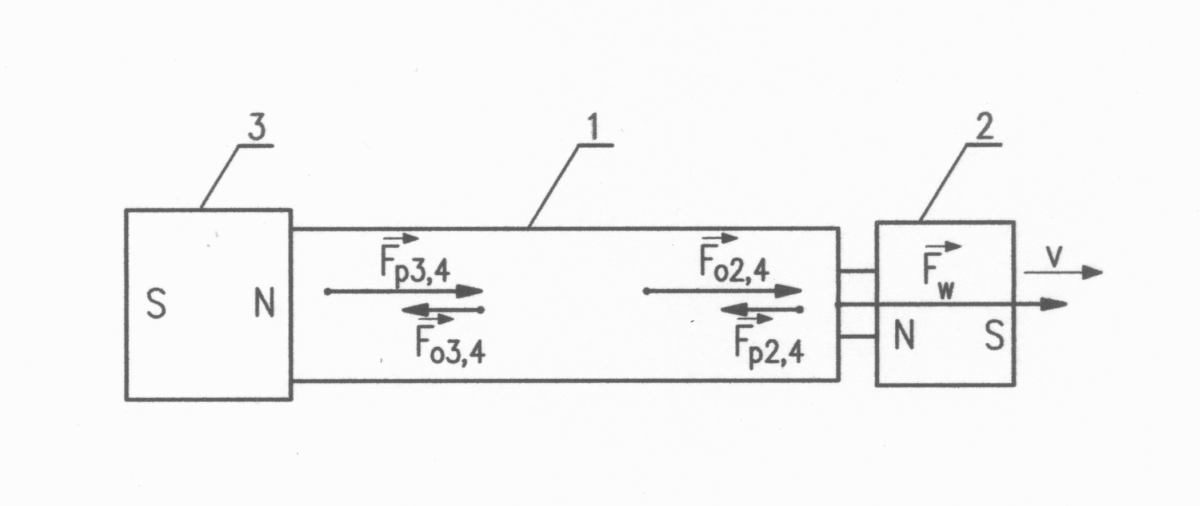
silnika elektrycznego:
przyciągania, odpowiednio, magnesów 2 i 3 oraz
odcinka spirali 4;
Fo3,4, Fo2,4 - siły odpychania,
odpowiednio, magnesów 2 i 3 oraz odcinka spirali 4;
Fw - siła wypadkowa; N, S - bieguny magnesów; v - prędkość.
Dociekliwy Czytelnik pewnie zauważy, że magnesy oddziałują również wzajemnie i powinny się odpychać, ponieważ zwrócone są do siebie biegunami jednoimiennym. To prawda, ale siły oddziaływania magnesów ze sobą są siłami wewnętrznymi wózka i nie mogą wprawić go w ruch. Powodują jedynie ściskanie baterii.
Ponadto, bieguny magnesów indukują w stalowej osłonie baterii bieguny różnoimienne (na rys. 2 są to bieguny S) i można powiedzieć, że dzięki temu pary biegunów S-N znajdujące się blisko siebie ulegają "neutralizacji". Gdyby bateria była zbyt krótka, albo nie miała stalowej osłony, wówczas wózek rozleciałby się z powodu odpychania magnesów. Ponieważ siły wewnętrzne nie mogą spowodować ruchu wózka, to na rys. 3 zostały one dla uproszczenia pominięte.
Działanie silnika można też wyjaśnić, zakładając, że linie pola magnetycznego w otoczeniu magnesów są zakrzywione. W wyniku tego istnieje składowa wektora indukcji pola magnetycznego prostopadła do zwojów spirali, w których płynie prąd elektryczny (rys. 4). Zgodnie ze znanymi regułami, np. regułą trzech palców lewej dłoni, na zwoje działa siła elektrodynamiczna, skierowana wzdłuż osi spirali. Dąży ona do przesunięcia spirali, ale jest to niemożliwe, ponieważ spirala opiera się o stół. W tej sytuacji, zgodnie z trzecią zasadą dynamiki, spirala działa na wózek siłą reakcji, zwróconą w przeciwną stronę i powoduje jego przesuwanie. Po przesunięciu się wózka magnesy załączają kolejne zwoje spirali. Zwoje te stają się kolejnym solenoidem, dla którego powtarza się opisana sytuacja, aż do momentu, gdy wózek "dojedzie" do końca spirali i jeden magnes się z niej wysunie.
Liniowy silnik na dwóch spiralach
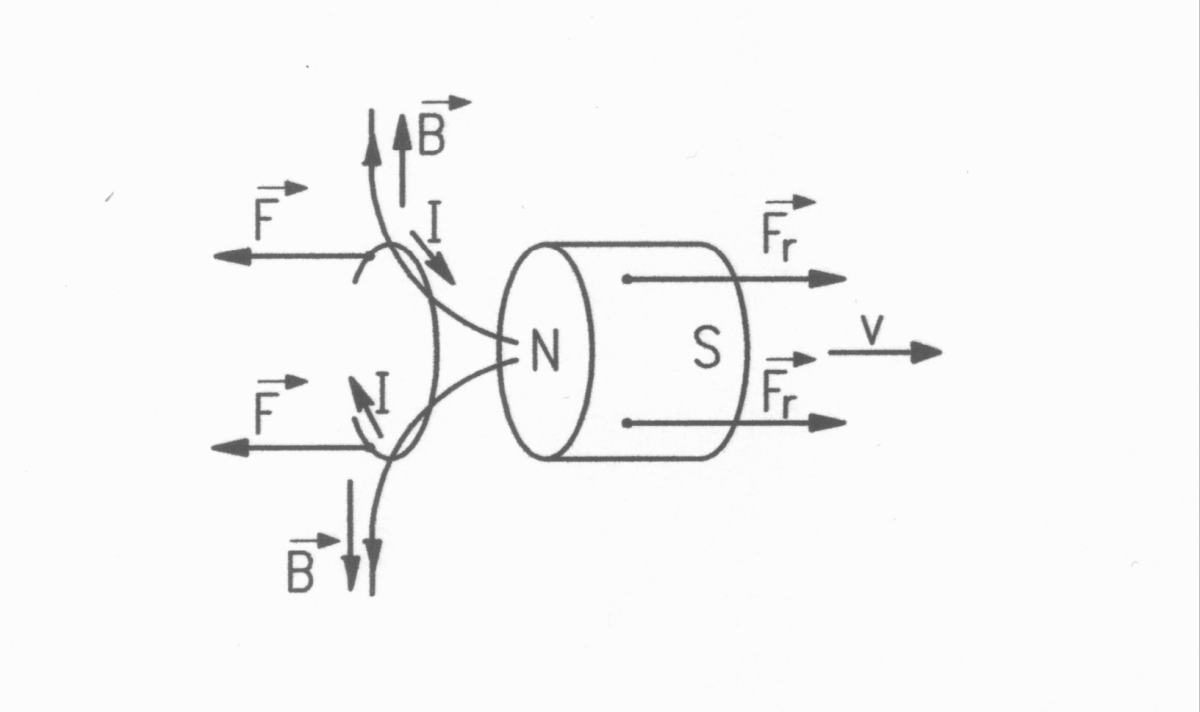
liniowego silnika elektrycznego:
B - indukcja pola magnetycznego;
I - natężenie prądu;
F - siła elektrodynamiczna działająca na spiralę;
Fr - siła reakcji działająca na wózek;
v - prędkość.
Najprostszy silnik liniowy z wózkiem poruszającym się wewnątrz spirali nie zawsze jest najbardziej użyteczny. Wózek może czasem zablokować się wewnątrz spirali - szczególnie, gdy zwoje nie są równo nawinięte, albo odstępy miedzy nimi pozostają zbyt duże. Wtedy należy jak najszybciej wypchnąć wózek nieferromagnetycznym pręcikiem, ponieważ zablokowanie spowoduje szybkie rozładowanie baterii i jej nagrzanie.
Niezależnie od tego do pewnych zastosowań potrzebne są wózki poruszające się po torze, a nie w tunelu. Dlatego teraz zbudujemy silnik liniowy na dwóch spiralach (rys. 5). W tym celu na dwóch prętach lub rurkach z materiału izolacyjnego, np. z plastiku o średnicy ok. 15 mm i długości kilkudziesięciu cm, nawijamy spirale, układając zwoje równo jeden przy drugim.
Tym razem użyjemy drutu w emalii o średnicy 0,5-1 mm. Drut należy zabezpieczyć przed odwinięciem się, np. przez przyklejenie jego początku i końca taśmą klejącą do pręta. Po nawinięciu spiral usuwamy emalię z ich zewnętrznych powierzchni przez potarcie drobnoziarnistym papierem ściernym (rys. 6). Obie spirale umieszczamy równolegle do siebie w odległości 1-2 mm. Można to zrobić za pomocą łączników przykręconych do końców prętów. W najprostszym przypadku wystarczy taśma izolacyjna, którą owiniemy kilka razy pręty na końcach - najpierw każdy osobno, a potem po złożeniu ich razem.
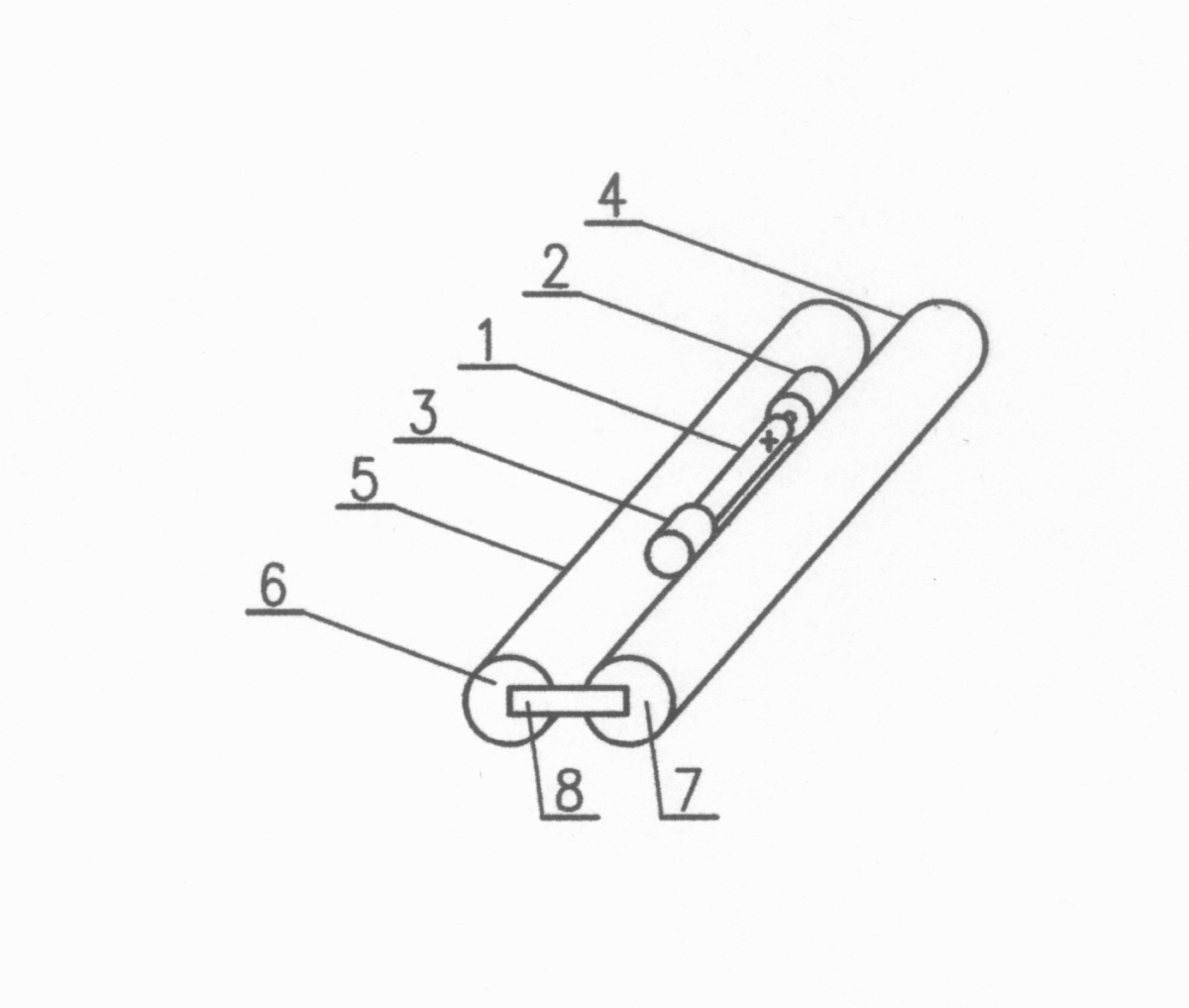
2, 3 - walcowe magnesy neodymowe;
4, 5 - spirale z miedzianego drutu w emalii usuniętej na zewnątrz;
6, 7 - pręty izolacyjne;
8 - łącznik.
Gdy na spiralach położymy wózek, taki sam jak poprzednio, zauważymy jego przesuwanie się (fot. 2). Jeżeli spirale zostały nawinięte równo, to możemy też stwierdzić, że podczas przesuwania się wózek obróci się wzdłuż kierunku ruchu. Jest to wynikiem działania na magnesy składowej stycznej siły elektrodynamicznej. Siła ta jest spowodowana tym, że drut ma pewną grubość i przez to zwoje nie są dokładnie prostopadłe do osi magnesów. Czytelnik - zmieniając rys. 4 tak, żeby zwój, w którym płynie prąd o natężeniu I, był ustawiony ukośnie, i stosując regułę lewej dłoni - może pokazać, że rzeczywiście pojawi się taka siła.
Zastosowania liniowych silników elektrycznych
Liniowe silniki elektryczne, których najprostsze przykłady mogliśmy przetestować w naszych kilku doświadczeniach, spotykamy w wielu urządzeniach. Wykorzystuje się je tam, gdzie potrzebny jest ruch postępowy. Przykładami dziedzin techniki, w których liniowe silniki elektryczne znalazły zastosowanie są więc transport, przemysł obrabiarkowy czy mechatronika, integrująca w jednym urządzeniu podzespoły mechaniczne, elektryczne i elektroniczne, czasem i optyczne, np. w skanerach czy kserokopiarkach.
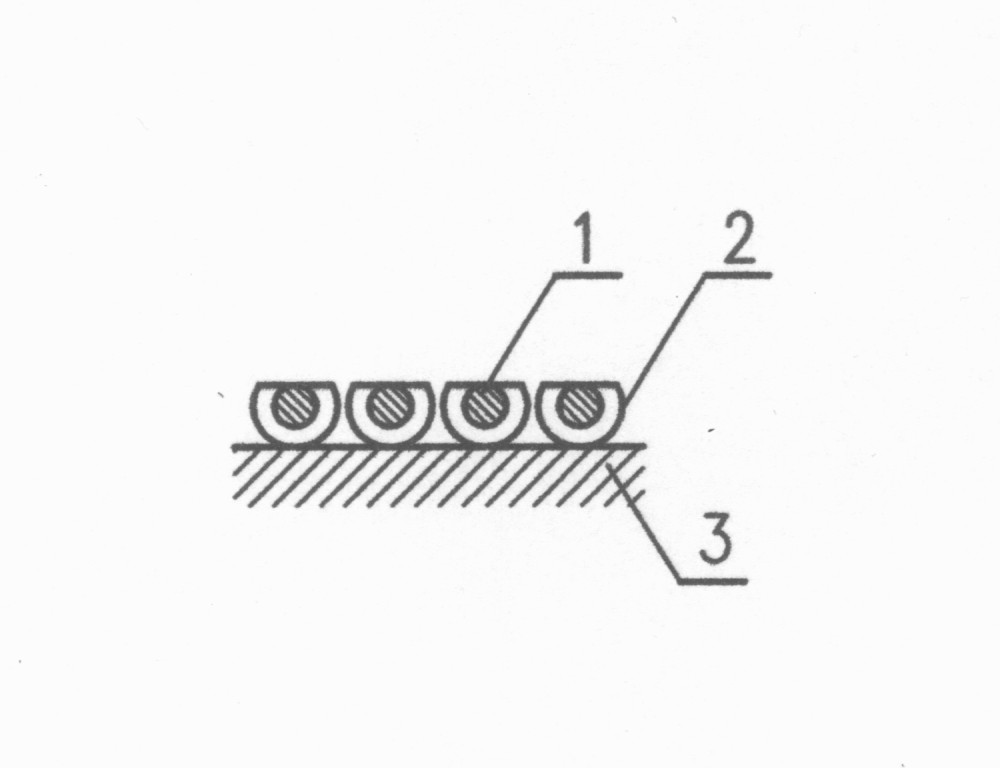
3 - pręt izolacyjny.
Istotną, wspominaną na początku, zaletą tych silników jest to, że nie zawierają one dodatkowych elementów, np. kół zębatych, prowadnic, zębatek czy mechanizmów korbowych, służących do zamiany ruchu obrotowego na ruch postępowy, które to elementy szybko się zużywają. Powoduje to uproszczenie ich konstrukcji i zwiększenie niezawodności.
Ważną zaletą jest też zasilanie energią elektryczną, którą można łatwiej doprowadzić przy pomocy kabli niż olej pod wysokim ciśnieniem, służący do uruchomiania siłowników hydraulicznych, również spełniających rolę silników liniowych, np. w maszynach do prac ziemnych. Wysokociśnieniowe węże doprowadzające tę ciecz powinny być szczelne i mieć dużą wytrzymałość, a ze spełnieniem tych wymagań, jak wiadomo, bywają kłopoty. Stąd też żartobliwe sformułowanie jednego z praw Murphy'ego, zgodnie z którym "wszystkie szczelne połączenia wcześniej czy później zaczynają przeciekać".
Bardzo obiecującą i intensywnie rozwijaną dziedziną zastosowań liniowych silników elektrycznych są koleje dużych prędkości. Unoszą się one nad torowiskiem dzięki lewitacji magnetycznej, co w istotny sposób zmniejsza ich opory ruchu. Eksperymentalne konstrukcje tych pojazdów, znane jako MAGLEV-y (skrót od magnetic levitation), zbudowane m.in. w Japonii i Chinach, osiągają prędkości ok. 600 km/godz.







