Czy przyszłością robotyki jest biomimetyka?

Na całym świecie inżynierowie opracowują roboty do różnych zastosowań. Polega to na budowaniu maszyn, które potrafią rozwiązywać określone problemy - latać lub pływać z punktu A do B, poruszać się w labiryncie o wąskich ścianach, chwytać i manipulować miękkim przedmiotem lub pokonywać określony dystans przy ograniczonym nakładzie energii.
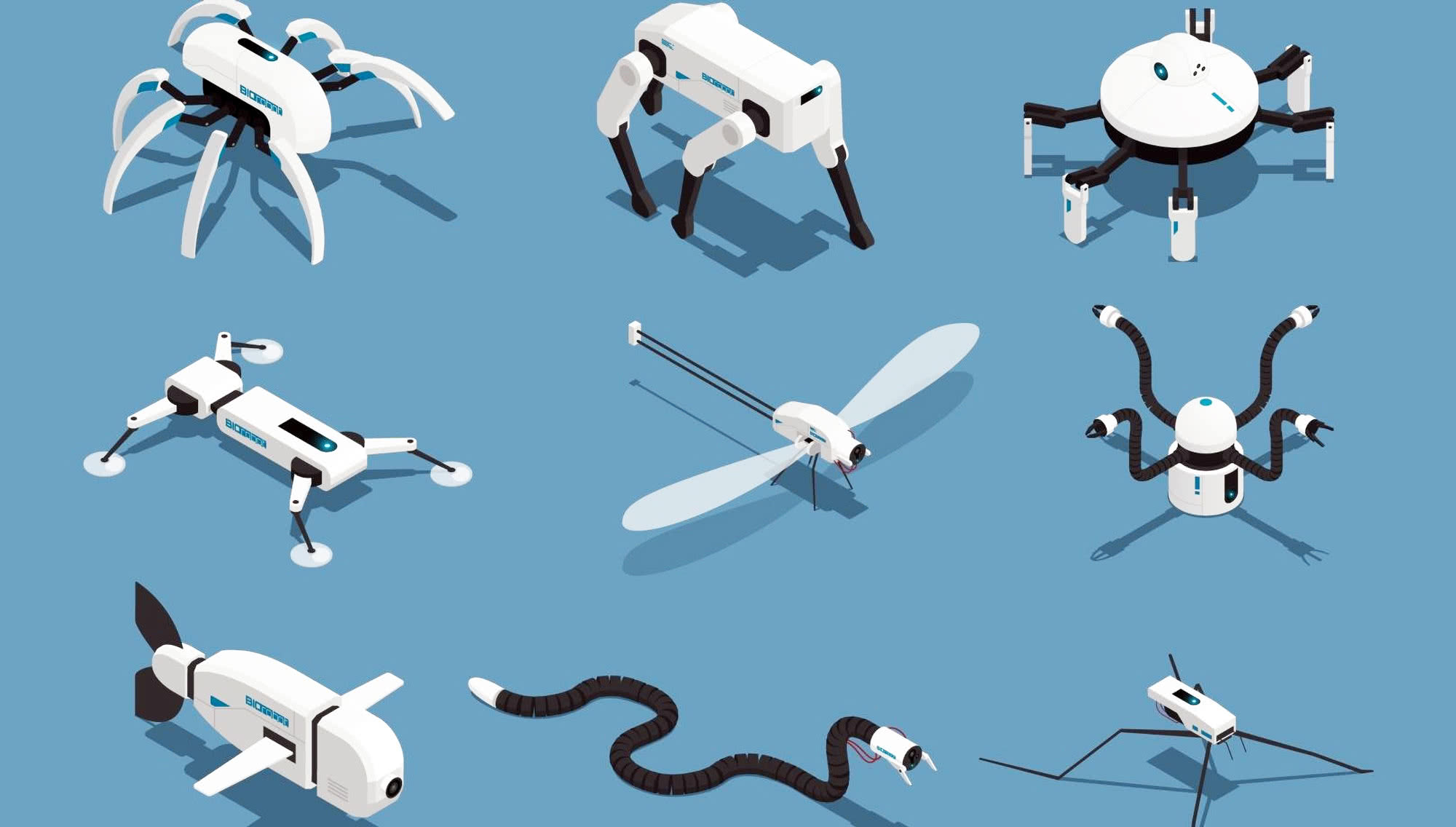
W ciągu milionów, jeśli nie miliardów lat, natura rozwiązała już wiele z tych problemów. Aby stworzyć roboty biomimetyczne, inżynierowie badają królestwo zwierząt, ustalają, jak działają ich struktury szkieletowe i mięśnie, a następnie przekładają je na serwomechanizmy i siłowniki (2).
Maszyny, które człowiek tworzył na przestrzeni wieków, a w ostatnich dziesięcioleciach ze szczególnym zapałem, bardzo często były inspirowane tym co znamy z przyrody - od skrzydlatego Ikara po latające maszyny Leonarda da Vinci. Natchnienia w świecie zwierząt od lat szuka najbardziej chyba znana firma na świecie Boston Dynamics, określając swoje czworonożne konstrukcje "psami" lub "gepardami", gdy wyróżniają się szybkością. Konstruująca i inspirująca się podobnie firma Ghost Robotics w październiku 2021 r. zaprezentowała uzbrojoną wersję swojego czworonożnego robota.
Japońska Toyota zwraca uwagę, że współczesna robotyka oparta na serwomechanizmach ma wady, ponieważ maszyny są zbyt ciężkie. Firma planuje zmienić ten stan rzeczy poprzez wprowadzenie nowych robotów wyposażonych w sztuczne mięśnie, co jest kolejnym nurtem inspiracji biologicznej w świecie robotów, rozwijanym od lat. Owe "mięśnie" to w tym rozumieniu zespoły elektrod z warstwą służącą do ułatwiania pozycjonowania oraz elektrodę umieszczoną między izolatorem próżniowym a elementem podtrzymującym wykonanym z wytrzymałego, ale elastycznego tworzywa sztucznego.
Firma planuje zbudować je z myślą o wykonywaniu niebezpiecznych dla człowieka czynności lub czynności powtarzalnych, które zazwyczaj mają negatywny wpływ na zdrowie człowieka. Te nowe roboty mogłyby umożliwiać zdalne sterowanie za pośrednictwem sieci 5G.
Macki i królestwo owadów
Zespół naukowców z Uniwersytetu Nowej Południowej Walii (UNSW) w Australii skonstruował robotyczny chwytak przypominający mackę (3), który ich zdaniem jest bardziej czuły niż konwencjonalne urządzenie w kształcie zaczepu lub dłoni, ponieważ owija się wokół obiektów niczym trąba słonia. Według opisu w "Advanced Materials Technologies", dzięki sieci czujników, które informują wężowego robota o sile chwytu, może prze-nosić delikatne przedmioty znacznie bezpieczniej niż konwencjonalne roboty.

Naukowcy twierdzą, że może chwytać przedmioty 220 razy cięższe od siebie i znaleźć szerokie zastosowanie w sektorach, w których mamy do czynienia z delikatnymi obiektami, np. w rolnictwie, przemyśle spożywczym i w eksploracji zasobów naturalnych, a nawet w ratownictwie medycznym. Oczekuje, że chwytak będzie dostępny na rynku w ciągu najbliższych 12 do 16 miesięcy, jeśli twórcy znajdą partnera przemysłowego.
Inny zespół naukowców, z Massachusetts Institute of Technology (MIT) i Uniwersytetu Harvarda stworzył z kolei rękę robotyczną, która jest nie tylko silna, ale i miękka. Zamiast używać chwytaków przypominających palce, ręka robota w kształcie stożka obejmuje obiekt, a następnie zapada się wokół niego, podobnie jak muchołówka wenus chwyta swoją ofiarę.
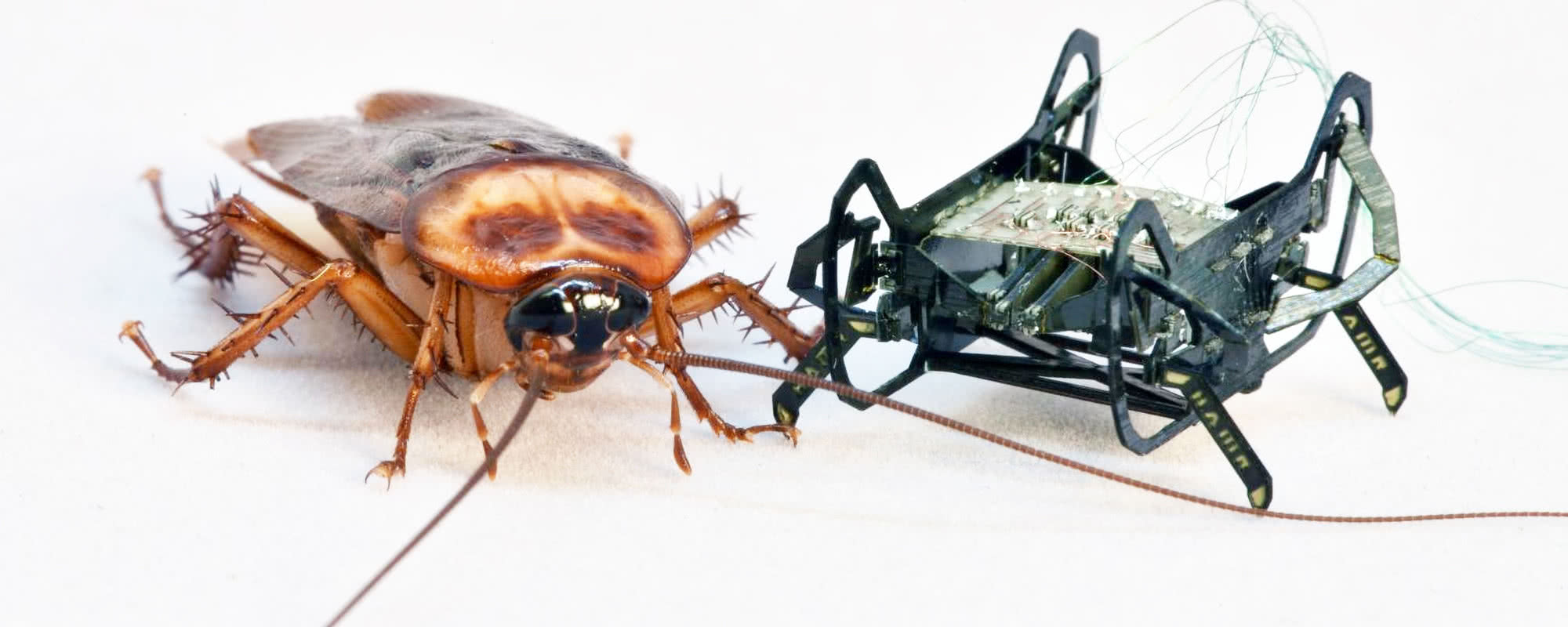
Mikrorobot HAMR Harvardu jest inspirowany karaluchem (4). Potrafi skakać po ziemi jak owad, ale może też poruszać się po powierzchni wody. Ma rozmiar spinacza do papieru i tyle samo waży. Jeśli HAMR ma zejść pod wodę, wystarczy przyłożyć do niego napięcie, co przerywa napięcie powierzchniowe cieczy. Badacze pracują nad rozwiązaniem, które umożliwi temu malutkiemu robotowi powrót na ląd. Ta sama bowiem fizyka, która pozwala robotowi chodzić po wodzie, utrudnia mu ucieczkę z podwodnego środowiska.
Technika Stickybot opracowana przez inżynierów z Uniwersytetu Stanforda to z kolei platforma robotyczna inspirowana umiejętnościami jaszczurki - gekona. Została opracowana w celu stworzenia robota wspinającego się po ścianach, który mógłby przyczepić się do każdego rodzaju powierzchni, od drewna, przez metal, po szkło.
Można sobie wyobrazić, że cała magia ruchu gekona wspinającego się po ścianach tkwi w nogach. Tak jednak nie jest. W dużym stop-niu pomaga w tym także ogon. To właśnie nacisk ogona przywiera nogi do ścian, umożliwiając utrzymanie przyczepności. Bez ogona tylko dwie przednie kończyny robota byłyby w stanie utrzymać przyczepność do powierzchni. W Stickybocie, podobnie jak u prawdziwego gekona, ogon jest odczepiany. Nie służy to jednak do ucieczki przed drapieżnikami, lecz po prostu ułatwia przechowywanie robota.
W laboratorium Biomimetic Millisystems Lab na Uniwersytecie Kalifornijskim w Berkeley opracowano szereg robotów imitujących żywe stworzenia, najczęściej owady. VelociRoach np. potrafi przebierać nogami z niezwykle wysoką częstotliwością, dzięki czemu 54-gramowy robot może poruszać się z prędkością 4,9 m/s. Robot ma składane kolce na nogach, które zwiększają przyczepność do powierzchni, podobne do struktur występujących na nogach pająków i karaluchów. Wariant, znany jako SailRoach, wykorzystuje malutki żagiel zamontowany na ogonie, który zapewnia aerodynamiczny mechanizm sterowania. Mikrorobot został nawet przystosowany do uwalniania pojazdu latającego MAV.
Inna owadopodobna konstrukcja, robot TAUB jest wzorowany na szarańczy, potrafiącego skoczyć na wysokość prawie czterech metrów i pokonać odległość ponad metra w poziomie. Robot nie wygląda jak szarańcza (5), ale jego konstrukcja opiera się na biomechanicznych cechach trzystopniowego mechanizmu skokowego szarańczy. Zdaniem szefa zespołu konstruktorów skaczącego robota, Amira Ayalego z Uniwersytetu w Tel Awiwie, maszyny takie mogą być wykorzystywane np. do przeszukiwania gruzowisk lub usuwania wycieków ropy.

Te co pływają i fruwają
Ze świata owadów przejdźmy do wyższych form życia. Naukowcy z Laboratorium Robotyki w Bristolu zaczęli swoje pracę nad biomimetycznymi konstrukcjami od nagrywania filmów, na których szczury używają swoich wąsów do "rozpoznania". Badacze zauważyli, że szczur steruje kierunkiem swojego nosa, aby zoptymalizować kontakt wąsów z badaną powierzchnią.
Następnie badacze opracowali wąsy z tworzywa sztucznego ABS i zaczęli konstruować robota za pomocą drukarek 3D. Do poruszania wąsami wykorzystano silniki, a zebrane informacje były przetwarzane przez chipy umieszczone w samym robocie. Robot może potencjalnie znaleźć wiele zastosowań - od badania rur wypełnionych zanieczyszczonym płynem po kontrolę jakości tekstyliów.
Latać umie Bat-Bot z Caltech. Nietoperze mają jedne z najbardziej złożonych mechanizmów latania wśród zwierząt. Ich skrzydła mogą zmieniać kształt podczas lotu, a ramiona, nogi, łokcie i nadgarstki poruszają się jednocześnie. Przełożenie tak skomplikowanego układu z natury na formę mechaniczną nie było łatwym zadaniem dla naukowców z Caltech.
W końcu powstał dron ważący 93 gramy, który uzyskuje większą wydajność z baterii niż jakikolwiek inny dron tych rozmiarów. Ruch latających robotów wzmacnia energię siłowników, dzięki czemu muszą one wkładać w pracę mniej wysiłku. Jednym z wyzwań jest odtworzenie elastycznej membrany skrzydeł tych "nietoperzy".
Konwencjonalne materiały, takie jak nylon czy mylar, nie były wystarczająco elastyczne. Zespół musiał opracować specjalną silikonową membranę. Poza efektywnością energetyczną Bat-boty mają jeszcze jedną zaletę. Ze względu na miękki silikon użyty do ich budowy mogą być używane w środowiskach, w których znajdują się przedmioty lub ludzie, którzy mogą zostać uszkodzeni lub zranieni, jeśli urządzenie zderzy się z nimi.
Inspirację z nietoperzy czerpie również inna konstrukcja - izraelski robot biomimetyczny Robat, który wprawdzie nie lata, poruszając się po ziemi na czterech kółkach, ale, podobnie jak zwierzęcy pierwowzór, wykorzystuje echolokację do mapowania otoczenia na podstawie dźwięku. Klasyfikuje granice i kształty napotkanych obiektów za pomocą własnej sztucznej sieci neuronowej.
Dość znaną konstrukcją jest miękka, robotyczna ryb, SoFi, zbudowana przez inżynierów z MIT. Sterowanie nią przypomina grę wideo - pilotem jest wodoodporny kontroler Super Nintendo. Tylna połowa ryby jest wykonana z elastycznego silikonu i gumy, natomiast przednia połowa jest wydrukowana w 3D i zawiera całą elektronikę.
Ze względu na zastosowane materiały robot może relatywnie bezpiecznie zderzać się z podwodnymi przeszkodami lub innymi formami życia. Na pokładzie znajduje się jednostka sterująca pływalnością, która może regulować ciśnienie powietrza, aby umożliwić rybie szybkie unoszenie się lub opadanie. Z przodu ryby znajduje się kamera.
Badacze z Narodowego Uniwersytetu Singapuru (NUS) opracowali innego podwodnego robota inspirowanego szczególnym gatunkiem ryby - mantą. Manty zainteresowały inżynierów ze względu na sposób, w jaki potrafią bez wysiłku pływać nawet w burzliwych morzach. Przełożenie tego naturalnego rozwiązania na robota pozwala na stworzenie wydajnych i skutecznych autonomicznych pojazdów podwodnych (AUV).
MantaDroid (6) jest wystarczająco szybki, aby przepłynąć w ciągu sekundy dwukrotność długości swojego ciała i może pozostać aktywny przez dziesięć godzin, więcej niż konwencjonalne drony wyposażone w śrubę napędową. Mogą być wykorzystywane do obserwacji podwodnych. Kolejnym rybokształtnym robotem jest AgnathaX, zaprojektowany tak, by naśladować minoga. Ma szereg silników, które uruchamiają dziesięć segmentów robota, co naśladuje mięśnie ciała minoga.

Naukowcy z Harvard SEAS już w 2013 roku po raz pierwszy odbyli testy mechanicznych "pszczół", choć tak naprawdę inspiracja wykracza tu daleko poza owady, zbliżając się do nurkujących ptaków. RoboBees potrafią bowiem nurkować z powietrza do wody i dalej pływać pod wodą, używając tych samych skrzydeł, których używają do latania. W powietrzu skrzydła biją z częstotliwością do trzystu herców. W wodzie prędkość uderzeń wynosi zaledwie trzynaście herców. Dodatkowo, pokonując ogromne napięcie Robotyczny nietoperz: powierzchniowe w tak małej skali, RoboBee może wyskoczyć z wody i wzbić się w powietrze.
Ptakopodobna konstrukcja to Robird (7), dron opracowany przez Clear Flight Solutions, który nadaje się do sterowania innymi ptakami. Robird wygląda i lata tak, jak prawdziwy drapieżny ptak, dzięki czemu można go wykorzystywać do oczyszczania pasów startowych z ptaków, aby umożliwić bezpieczny start samolotów, oraz do utrzymywania ptaków z dala od obszarów przemysłowych i rolniczych. Zbudowano dwa Robirdy, jeden wygląda jak sokół wędrowny, a drugi jak orzeł.

Od kosmosu po medycynę
Powyższe wynalazki wyglądają jak fajne zabawy inżynierów w laboratoriach, ale w rzeczywistości biomimetyczna robotyka traktowana jest bardzo poważnie. NASA rozważa wysłanie na księżyc Europa robotycznej kałamarnicy, wyposażonej w macki elektrodynamiczne, które pozyskują energię ze zmieniających się lokalnie pól magnetycznych. Te same macki miałyby pozwalać łazikowi poruszać się w wodzie. Ten sam system energetyczny i lokomocyjny może być również wykorzystany do poruszania się łazika po powierzchni Księżyca, jeśli zajdzie taka potrzeba. Inspiracją dla łazika była kałamarnica znana z ziemskich wód.
System robotyczny Flex firmy Medrobotics już teraz pozwala lekarzom sięgać w głąb ciała przy minimalnym ryzyku dla pacjenta. System Flex jest oparty na wężopodobnej strukturze z wieloma mechanicznymi połączeniami. "Oczy" węża widzą w 3D, pomagając chirurgowi w nawigacji. Lekarz steruje ruchami węża za pomocą joysticka przypominającego grę wideo.
Po umieszczeniu na miejscu, Flex może się usztywnić, umożliwiając chirurgowi wprowadzenie instrumentów, które mogą ciąć lub zszywać, sterowane robotycznie za pomocą joysticka. Flex jest idealny do badania nieliniowych lub okrężnych dróg, takich jak okrężnica, co jest trudnym i czasami niebezpiecznym zadaniem przy użyciu tradycyjnego prostego endoskopu. Flex może również wchodzić przez usta, umożliwiając lekarzom dotarcie do trudno dostępnych obszarów ciała, takich jak krtań i struny głosowe.
Węże są, jak widać po licznych przykładach popularną zwierzęcą inspiracją dla ruchu i systemów chwytających robotów (8). David Zarrouck, kierownik Laboratorium Robotyki Medycznej i Bioinspiracji Uniwersytetu Ben-Guriona w izraelskim Negev, opracował MASR, robota przypominającego węża, poruszającego się tam i z powrotem wzdłuż cienkiej, obrotowej struktury za pomocą dwóch silników, które przesuwają się w górę i w dół jego przegubowego "ciała".

Dodatkowe segmenty można łatwo dodawać i odejmować, do czterech ogniw w czasie krótszym niż minuta. MASR jest przeznaczony do takich zadań w rolnictwie (np. do zbierania owoców), poszukiwania i ratowania ludzi oraz naprawiania, dokowania i tankowania satelitów w przestrzeni kosmicznej.
Tak głodny, że zjadłby robota z chwytakami
Jednym z nowszych nurtów w rozwoju naśladujących naturę robotów jest szukanie możliwości budowy miękkich, bezpiecznych, bardziej przyjaznych a nawet łatwiej akceptowalnych przez ludzi konstrukcji w ich otoczeniu.
Najbardziej znana chyba konstrukcja tego rodzaju to Octobot to maszyna inspirowana ośmiornicą, opracowana na Uniwersytecie Harvarda i wykonana wyłącznie z miękkich materiałów i elektroniki. Jednak akurat ośmiornica może nie być najlepszym przykładem tej tendencji.
Jedne z najciekawszych projektów w dziedzinie nowych "miękkich" robotów powstają w szwajcarskiej Politechnice Federalnej w Lozannie (EPFL). Większość prac prowadzonych w tej dziedzinie jest przeznaczona do zastosowań medycznych. Tak jest w przypadku systemów opracowywanych przez prof. Stéphanie Lacour, która kieruje Laboratorium Miękkich Interfejsów Bioelektronicznych EPFL. Jej grupa opracowała elastyczne struktury zawierające wbudowane czujniki, które mogą być stosowane na lub w ciele człowieka.
Inżynierowie z Laboratorium Rozproszonych Inteligentnych Systemów i Algorytmów EPFL (DISAL) również badają, w jaki sposób ludzie i grupy robotów wchodzą w interakcje z otoczeniem. Dawniej roboty wykonywały swoje zadania w osłoniętych miejscach, w kontrolowanych środowiskach, z dala od ludzi. Coraz częściej jednak ludzie i roboty działają w tej samej przestrzeni. Oznacza to, że będziemy musieli przejść z dwóch oddzielnych środowisk do jednego kontrolowanego środowiska.
Jeśli zrobotyzowane organizmy mają być przyjazne dla środowiska, muszą być wykonane z materiałów ulegających biodegradacji, tak aby mogły wejść do łańcucha pokarmowego i w końcu zniknąć bez śladu. Wielu inżynierów, w tym z Laboratorium Systemów Inteligentnych EPFL, bada możliwości wykorzystania biodegradowalnych polimerów i biopolimerów (takich jak kolagen, żelatyna i celuloza), które są nieszkodliwe dla środowiska.
Niektóre tworzywa sztuczne - takie jak kwas polimlekowy i polikaprolakton - również ulegają biodegradacji. Materiały te można łatwo pozyskać, co oznacza, że nie stanowią dużego obciążenia dla naszych zasobów naturalnych i rozkładają się w sposób nieszkodliwy.
Wydawałoby się, że roboty i jedzenie to dwa nie mające ze sobą nic wspólnego światy. Jednak pomysł połączenia tych dwóch rzeczy może nie być tak odległy, jak się wydaje. Na Międzynarodowej Konferencji na temat Inteligentnych Robotów i Systemów (IROS), która odbyła się w Vancouver w październiku 2017 r., Laboratorium Systemów Inteligentnych badacze z EPFL przedstawili prezentację, która wywołała niemałą sensację. Grupa kierowana przez prof. Dario Floreano zaprezentowała zrobotyzowany chwytak wykonany z żelatyny, gliceryny i wody, który był w pełni jadalny. Inżynierowie opracowali już jadalne tranzystory, elektrody, kondensatory, baterie i czujniki, ale nigdy nie udało im się stworzyć prawdziwego robota (w tym przypadku siłownika) zdolnego do wykonania zadania.
O "jadalnych robotach" myślano początkowo w kontekście czujników medycznych, które można bezpiecznie połykać. Jednak potem, gdy ktoś zauważył, że niektóre jadalne związki mogą również wytwarzać energię elektryczną, co skłania do myślenia, że pewnego dnia takie jadalne roboty mogłyby nawet same siebie konsumować.
Znany jest też projekt RoboFood, pionierskie podejście, które wykorzystuje najnowsze osiągnięcia w robotyce i nauce o żywności w celu opracowania robotów, które mogą służyć jako żywność oraz żywności, która może zachowywać się jak roboty. Celem naukowców jest "wykorzystanie zasad robotyki miękkiej i zaawansowanych metod przetwarzania żywności, aby utorować drogę do nowej przestrzeni projektowej dla robotów jadalnych i żywności robotycznej".
Byłoby to nieco dziwne pociągnięcie naśladownictwa i inspiracji światem natury jeszcze dalej, ale nie ma w tym niekonsekwencji, gdyż, jak wiadomo, wiele z żywych stworzeń spożywamy jako pożywienie. Dlaczego więc cykl życia robotów miałby być inny niż zwierząt, których mięso zjadamy?
Mirosław Usidus