Maszyna jak żywa. Bio-inspiracje w robotyce

W ciągu milionów, jeśli nie miliardów lat, natura rozwiązała w udany sposób wiele problemów, z którymi boryka się współczesna robotyka. Inżynierowie badają królestwo żywych stworzeń, ustalając, jak działają ich struktury szkieletowe i mięśnie, i jak mogłyby pomóc w serwomechanizmach i siłownikach. Zresztą koncepcja bioinspiracji w świecie maszyn nie jest nowa - od mitu skrzydlatego Ikara po latające maszyny Leonarda da Vinci. Natchnienia w świecie zwierząt od lat szuka najbardziej chyba znana firma na świecie, Boston Dynamics, określając swoje czworonożne konstrukcje „psami” lub „gepardami”. Zarówno sławny Big Dog, który, wbrew nazwie, przypominał raczej muła niż psa, jak szybka Cheetah galopująca jak gepard czy Spot, który jest zupełnie jak pies, to dość oczywiste w swoim wyglądzie i motoryce konstrukcje biomimetyczne.
Japońska Toyota zauważyła, że współczesne roboty oparte na serwomechanizmach mają wady, ponieważ są zbyt ciężkie. Stąd pomysł budowy sztucznych mięśni. Owe „mięśnie” to układy elektrod z warstwą służącą do ułatwiania pozycjonowania oraz elektrodą umieszczoną między izolatorem próżniowym a elementem podtrzymującym wykonanym z wytrzymałego, ale elastycznego tworzywa sztucznego.
Macki, trąby i wężowe ruchy
Poszukiwania w naturze alternatywnych rozwiązań problemu ruchu i przemieszczania się robotów nie ustają, np. naukowcy z Uniwersytetu Oregonu opisali niedawno jako pierwsi system napędowy syfonoforów (2), długich i wstęgowanych stworzeń morskich, odkrywając, że składa się z wielu workowatych organów, zwanych nektoforami, które kurczą się, wystrzeliwując strumień wody, napędzający organizm na całej długości, a nie jedynie punktowo, co ma potencjał biomimetyczny, jako nowy napęd dla podwodnych robotów.
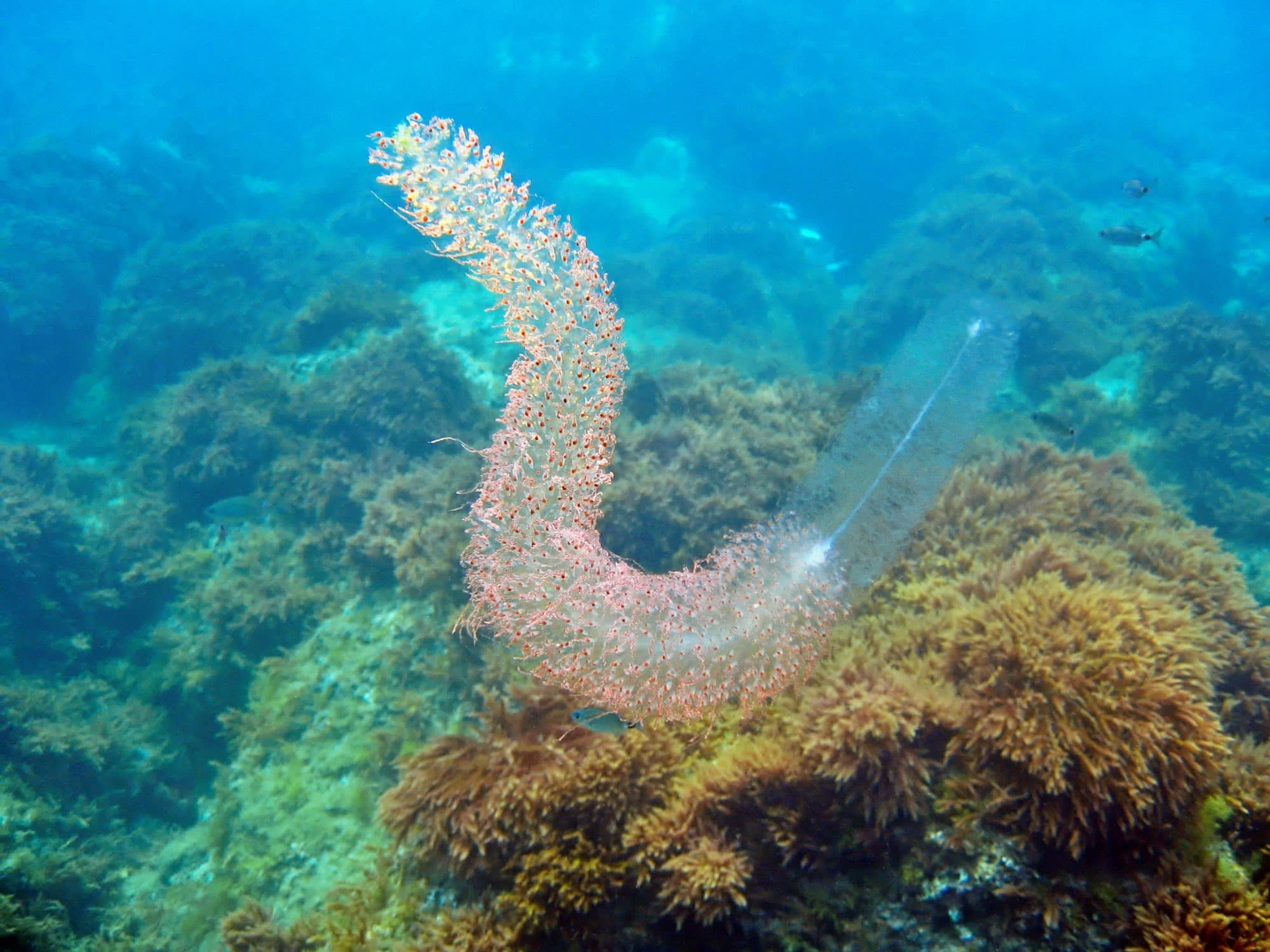
Zdjęcie: stock.adobe.com
NASA rozważa wysłanie na księżyc Europa robotycznej kałamarnicy, wyposażonej w macki elektrodynamiczne, które pozyskują energię ze zmieniających się lokalnie pól magnetycznych. Te same macki miałyby pozwalać łazikowi poruszać się w wodzie. Ten sam system energetyczny i lokomocyjny może być również wykorzystany do poruszania się łazika po powierzchni Księżyca.
Na Uniwersytecie Stanu Michigan powstał z kolei sztuczny wąż (3), który ma ułatwiać poszukiwanie ofiar katastrof. Potrafi się przeciskać przez niedostępne dla ratowników zwały gruzu, bez oporu pełza po schodach, które grożą zawaleniem. W ogóle naśladowanie węży w robotyce nie jest całkiem nową koncepcją. Jednak konstrukcja opracowana kilka lat temu przez specjalistów z Uniwersytetu Carnegie Mellon w Stanach Zjednoczonych wyróżniała się tym, że poszła w biomimetyzmie krok dalej, czerpiąc nie z węży w sensie ogólnym, ale z konkretnego gatunku - grzechotnika rogatego.

Zdjęcie: Public Domain, https://commons.wikimedia.org
Badacze modelowali ruchy węży, horyzontalne i wertykalne. Zwierzęta, mimo że ich ciało składa się z tysięcy części składowych, co do zasady poruszają się tylko za pomocą kombinacji tych dwóch podstawowych typów ruchów. Prototypy zbudowanych robotów imitujących wężowe ruchy mają ok. 5 cm średnicy w przekroju, niespełna metr długości i składają się z szesnastu modułów. Także David Zarrouck z Uniwersytetu Ben-Guriona w izraelskim Negev, opracował MASR, robota przypominającego węża, poruszającego się tam i z powrotem wzdłuż cienkiej, obrotowej struktury za pomocą dwóch silników, które przesuwają się w górę i w dół jego przegubowego „ciała”. Dodatkowe segmenty można łatwo dodawać i odejmować, do czterech ogniw w czasie krótszym niż minuta. MASR jest przeznaczony do zadań w rolnictwie (np. do zbierania owoców), poszukiwania i ratowania ludzi oraz naprawiania, dokowania i tankowania satelitów w przestrzeni kosmicznej.
Nieco kojarząca się tymi projektami, naśladująca jednak wijące się robaki konstrukcja o nazwie CMMWorm jest dziełem zespołu naukowców z Center for Biologically-Inspired Robotics Research przy Uniwersytecie Case Western. Konstrukcja inspirowana jest dżdżownicą poruszającą się tzw. ruchem perystaltycznym. Służą do tego dwa rodzaje mięśni, które ściskają i rozszerzają worki płynu, dzięki którym robak może robić się cienki i długi oraz krótszy i szerszy, co umożliwia mu poruszanie się do przodu. Naukowcy, studiując jego fizyczny i neurologiczny system, zbudowali robota, który w sposób mechaniczny potrafi odtwarzać ten ruch. Jest to szczególnie przydatne w ciasnych przestrzeniach, przez które maszyna może się z łatwością przeciskać.
Są też, również nieco kojarzące się w tymi eksperymentami, prototypy robotycznych ramion imitujących słoniowe trąby. Stworzone zostały przez firmę Tesla, która za pomocą takich konstrukcji dążyła do automatyzacji procesu ładowania akumulatorów w swoich pojazdach. Dużo wcześniej, bo jeszcze w maju 2015 roku, czasopismo branżowe „Bioinspiration and Biomimetics” napisało o rozwiązaniu robotycznego ramienia chirurgicznego opartego na mackach ośmiornicy. Pozbawione kręgów ramiona tego zwierzęcia wydają się dobrym rozwiązaniem tam, gdzie potrzeba giętkich ruchów i obrotów. Jednocześnie takie ramię musi być odpowiednio silne i pewne.
Włoscy uczeni ze Szkoły Nauk Zaawansowanych Sant’Anna zbudowali macki robota-chirurga z identycznych modułów. W ich środku znajdują się komory powietrzne, których napełnianie powietrzem i opróżnianie odpowiada za ruchy ramienia. Niezbędne w pewnych sytuacjach jego usztywnienia uzyskuje się dzięki granulatowi w środku, który po odpompowaniu powietrza tworzy twardą i sztywną masę. System robotyczny Flex firmy Medrobotics już teraz pozwala lekarzom sięgać w głąb ciała przy minimalnym ryzyku dla pacjenta. System Flex jest oparty na wężopodobnej strukturze z wieloma mechanicznymi połączeniami. „Oczy” węża widzą w 3D, pomagając chirurgowi w nawigacji. Lekarz steruje ruchami węża za pomocą joysticka. Flex może również wchodzić przez usta, umożliwiając lekarzom dotarcie do trudno dostępnych obszarów ciała, takich jak krtań i struny głosowe.
Zespół naukowców z Uniwersytetu Nowej Południowej Walii (UNSW) w Australii skonstruował robotyczny chwytak przypominający mackę, który ich zdaniem jest bardziej czuły niż konwencjonalne urządzenie w kształcie zaczepu lub dłoni, ponieważ owija się wokół obiektów niczym trąba słonia. Według opisu w „Advanced Materials Technologies”, dzięki sieci czujników, które informują wężowego robota o sile chwytu, może przenosić delikatne przedmioty znacznie bezpieczniej niż konwencjonalne roboty. Naukowcy twierdzą, że może chwytać przedmioty 220 razy cięższe od siebie i znaleźć szerokie zastosowanie w sektorach, w których mamy do czynienia z delikatnymi obiektami, np. w rolnictwie, przemyśle spożywczym, a nawet w ratownictwie medycznym.
Jednym z nowych nurtów w robotyce biomimetycznej jest szukanie możliwości budowy miękkich, bezpiecznych, bardziej przyjaznych i bezpiecznych dla ludzi konstrukcji, jeśli pracują w naszym otoczeniu. Najbardziej znana chyba konstrukcja tego rodzaju to Octobot, maszyna inspirowana ośmiornicą, opracowana na Uniwersytecie Harvarda i wykonana wyłącznie z miękkich materiałów i elektroniki.
Dość znanym w dziedzinie wijącej się robotyki projektem była „miękka i sprężysta” ryba-robot SoFi stworzona na MIT. Ryba była jednocześnie systemem autonomicznym, który, pływając w wodzie, potrafił reagować dynamicznie na zmieniające się warunku, płynąć taką samą techniką jak żywe ryby i w razie potrzeby przyspieszać. Zastosowano w niej nowy typ płynnych i elastycznych aktuatorów, które przypominają mięśnie. Badacze z Narodowego Uniwersytetu Singapuru (NUS) opracowali innego podwodnego robota inspirowanego konkretnym gatunkiem ryby - mantą. Manty zainteresowały inżynierów ze względu na sposób, w jaki potrafią bez wysiłku pływać nawet w burzliwych morzach. Przełożenie tego naturalnego rozwiązania na robota pozwala na stworzenie wydajnych i skutecznych autonomicznych pojazdów podwodnych (AUV). MantaDroid (4) był wystarczająco szybki, aby przepłynąć w ciągu sekundy dwukrotność długości swojego ciała i pozostać aktywny przez dziesięć godzin, więcej niż konwencjonalne drony wyposażone w śrubę napędową. Kolejnym rybokształtnym robotem jest AgnathaX, zaprojektowany tak, by naśladować minogę. Ma szereg silników, które uruchamiają dziesięć segmentów robota, co naśladuje mięśnie ciała minoga.

Zdjęcie: stock.adobe.com
Naukowcy pracują również nad miękkimi urządzeniami robotycznymi, które są napędzane przez tkankę nerwowo-mięśniową, pobudzaną przez światło. Praca naukowa na ten temat, opublikowana w „Proceedings of the National Academy of Science”, opisuje „dwunożne” urządzenia zdolne do poruszania się dzięki energii pozyskanej wyłącznie z tkanki.
Roją się nam roboty-owady
Skoro próbuje się imitować ryby, to dlaczego nie ptaki. Zbudowane na wzór skrzydlatych stworzeń roboty machają skrzydłami jak żywe i potrafią przelecieć w powietrzu setki metrów. Ptakopodobna konstrukcja to Robird, dron opracowany przez Clear Flight Solutions; wygląda i lata tak, jak prawdziwy drapieżny ptak, dzięki czemu można go wykorzystywać do oczyszczania pasów startowych z ptaków, aby umożliwić bezpieczny start samolotów, oraz do utrzymywania ptaków z dala od obszarów przemysłowych i rolniczych.
Jednak nie można ich zdolności manewrowania nawet porównywać np. z mewami. Inne latające małe projekty, choćby różne projekty latających sztucznych ważek i motyli, także zupełnie nie mają nic wspólnego ze sprawnością owadzich pierwowzorów. Owady swoje osiągi w lotach, skokach i biegach zawdzięczają rezylinie, białku zawartemu w mięśniach. Ten naturalny elastomer o nieuporządkowanej strukturze (czyli - w dużym uproszczeniu - polimer zdolny do wielokrotnego odkształcania i rozciągania) występuje większości skaczących i latających owadów. W ciągu ich życia podlega milionom cykli rozciągania, nie tracąc jednak przy tym swoich właściwości. Sprawność rezyliny wynosi 97 proc., co oznacza, że zaledwie 3 proc. energii traconej jest jako ciepło. Stworzenie syntetycznej rezyliny zmieniłoby oblicze robotyki, nanotechnologii i kilku innych dziedzin. Jednak, mimo licznych prób, nie udało się wytworzyć sztucznego materiału o choćby zbliżonych cechach.
Skoro z lataniem jest problem, to może owady naziemne? Kilka lat temu naukowcy z Uniwersytetu Karoliny Północnej opracowali oprogramowanie, które pozwoli badać nieznane środowiska, np. ruiny zawalonych budynków, dzięki danym przekazywanym przez rój minirobotów lub owadów-cyborgów z wszczepionymi chipami naśladujący zachowanie prawdziwych owadów. Chmara np. zrobotyzowanych karaluchów z sensorami wpuszczona zostałaby do miejsca, które chcemy eksplorować i zmapować. Początkowo sterujący systemem pozwalają im się rozejść wedle uznania. Dane zbierane byłyby przez radio, gdyż GPS nie jest w stanie precyzyjnie lokalizować tak małych obiektów.
Mikrorobot HAMR Harvardu jest wprost inspirowany karaluchem. Potrafi skakać po ziemi jak owad, ale może też poruszać się po powierzchni wody. Ma rozmiar spinacza do papieru i tyle samo waży. Jeśli HAMR ma zejść pod wodę, wystarczy przyłożyć do niego napięcie, co przerywa napięcie powierzchniowe cieczy. Badacze pracują nad rozwiązaniem, które umożliwi temu malutkiemu robotowi powrót na ląd. Ta sama bowiem fizyka, która pozwala robotowi chodzić po wodzie, utrudnia mu ucieczkę z wodnego środowiska.
Inna owadopodobna konstrukcja, robot TAUB, jest wzorowany na szarańczy, potrafiącej skoczyć na wysokość prawie czterech metrów i pokonać odległość ponad metra w poziomie. Zdaniem szefa zespołu konstruktorów skaczącego robota, Amira Ayalego z uniwersytetu w Tel Awiwie, maszyny takie mogą być wykorzystywane np. do przeszukiwania gruzowisk lub usuwania wycieków ropy.
Uczeni testują „insektomimetykę” na różne sposoby. Badacze z uniwersytetów w Sheffield i Sussex opracowali np. model pszczelego mózgu w niewielkim robocie. Chodziłoby tu o komputerową symulację jej zmysłów, węchu, wzroku i umiejętności sprawnej nawigacji w locie. Jednym z głównych zadań „mechanicznych pszczółek” będzie wsparcie ich naturalnych pierwowzorów w pracy na łąkach, polach i w ogrodach, czyli w zapylaniu (5). Nie od dziś wiadomo, że pszczoły giną. Stąd pomysł na skonstruowanie armii zapylających robocików, które będą latać, „myśleć” i postrzegać otoczenie jak prawdziwe pszczoły.

Zdjęcie: stock.adobe.com
Nad podobnym projektem pracowano również w Polsce. Naukowcy z Harvard SEAS już w 2013 roku po raz pierwszy przeprowadzili testy mechanicznych „pszczół”, choć tak naprawdę inspiracja wykraczała wtedy daleko poza pszczoły, zbliżając się do nurkujących ptaków. RoboBees potrafią bowiem nurkować z powietrza do wody i dalej pływać pod wodą, używając tych samych skrzydeł, których używają do latania. Pokonując napięcie powierzchniowe w małej skali, RoboBees mogły wyskakiwać z wody i wzbijać się w powietrze.
Ciekawą kontynuacją wysiłków uczonych, odtwarzających zachowania rojów niewielkich stworzeń w robotyce jest powstały na brytyjskim Uniwersytecie Lincoln pomysł wykorzystania feromonów do komunikacji pomiędzy maszynami. Nie próbowali tworzyć sztucznych feromonów, czyli substancji chemicznych. Ich system, nazwany COS-phi, to „wizualny feromon”. Małe roboty w roju otrzymują obraz ścieżki ruchu i za pomocą prostych czujników odbierają go, podążając w pożądanym, zgodnym z ruchem roju, kierunku.
Warto pamiętać też o biodegradacji
Ze świata owadów przejdźmy do wyższych form życia. Naukowcy z Laboratorium Robotyki w Bristolu zaczęli swoje prace nad biomimetycznymi konstrukcjami od nagrywania filmów, na których szczury używają swoich wąsów do „rozpoznania”. Badacze zauważyli, że szczur steruje kierunkiem swojego nosa, aby zoptymalizować kontakt wąsów z badaną powierzchnią. Opracowali wąsy z tworzywa sztucznego ABS i zaczęli konstruować robota za pomocą drukarek 3D. Do poruszania wąsami wykorzystano silniki, a zebrane informacje były przetwarzane przez chipy umieszczone w samym robocie. Robot może potencjalnie znaleźć wiele zastosowań - od badania rur wypełnionych zanieczyszczonym płynem po kontrolę jakości tekstyliów.
Latać umie Bat-Bot z Caltech. Nietoperze mają jedne z najbardziej złożonych mechanizmów napędzających lot wśród zwierząt. Ich skrzydła mogą zmieniać kształt podczas lotu, a ramiona, nogi, łokcie i nadgarstki poruszają się jednocześnie. Przełożenie tak skomplikowanego układu z natury na formę mechaniczną nie było łatwym zadaniem dla naukowców. W końcu powstał dron ważący 93 gramy, który uzyskuje większą wydajność z baterii niż jakikolwiek inny dron tych rozmiarów. Ruch latających robotów wzmacnia energię siłowników, dzięki czemu muszą one wkładać w pracę mniej wysiłku. Inspirację z nietoperzy czerpie również inna konstrukcja, izraelski robot biomimetyczny Robat, który wprawdzie nie lata, poruszając się po ziemi na czterech kółkach, ale podobnie jak zwierzęcy pierwowzór, wykorzystuje echolokację do mapowania otoczenia na podstawie dźwięku.
Jeśli zrobotyzowane organizmy mają być przyjazne dla środowiska, muszą być wykonane z materiałów ulegających biodegradacji, tak aby mogły wejść do łańcucha pokarmowego i w końcu zniknąć bez śladu. Wielu inżynierów bada możliwości wykorzystania biodegradowalnych polimerów i biopolimerów (takich jak kolagen, żelatyna i celuloza), które są nieszkodliwe dla środowiska. Niektóre tworzywa sztuczne, np. kwas polimlekowy i polikaprolakton, również ulegają biodegradacji. Jeśli chcemy wprowadzać nasze biomimetyczne roboty do natury (6), to warto pomyśleć, jak potem je z natury usunąć, by nie stanowiły obciążenia dla środowiska.

Zdjęcie: stock.adobe.com
Mirosław Usidus