Maszyny, automaty, drony w rojach. Kupą, mości roboty

Niedawno izraelskie wojsko podało, że w maju, podczas napięć i wymiany ognia z Palestyńczykami, przeprowadziło ponad trzydzieści operacji przy użyciu rojów dronów. Według tamtejszych wojskowych, było to pierwsze użycie roju dronów w walce. Jak pisał "New Scientist" drony w roju posłużyły do lokalizacji i ataków pozycji bojowników Hamasu. W ostatnich latach, jeśli chodzi o sferę militarną, mieliśmy sporo informacji o testach zespołów autonomicznych maszyn latających. Siły zbrojne USA testowały roje setek dronów w locie, zaś armia rosyjska - oprogramowanie do łączenia pojedynczych dronów w grupy.
Jednak jak do tej pory nie było doniesień o użyciu tej technologii w walce. Według rzecznika Sił Obronnych Izraela wszystkie drony były obsługiwane przez jednego operatora. Obok niego był dowódca, który podejmował decyzje. Kilku kolejnych żołnierzy przygotowywało i uzbrajało drony, niewielkie quadrokoptery.
Tajemnice stygmergii
Wielu konstruktorów uważa, że dopóki nie znajdziemy wydajnego i czystego źródła energii dla robotów w skali makro, lepiej skupić się na ich mniejszych braciach, które w teorii pracują znacznie wydajniej w zespołach, grupach i rojach (1). Na przykład przy penetrowaniu nieznanych środowisk, np. ruin zawalonych budynków. Oprogramowanie pozwalające pracować rojom maszyn w takich warunkach opracowali m.in. naukowcy z Uniwersytetu Karoliny Północnej. W ich rozwiązaniu chmara cyberkaraluchów wpuszczona zostaje do miejsca, które chcemy eksplorować i zmapować. Dane zbierane są z sensorów umieszczonych na robocikach przez radio, gdyż GPS nie jest w stanie precyzyjnie lokalizować tak małych obiektów.
Roboty-quadrokoptery koordynujące się w locie z innymi maszynami rozwijane są od co najmniej dekady. Jeszcze w 2012 roku na politechnice w Zurychu zademonstrowano wczesną wersję zespołowego działania w powietrzu, polegającego na wzajemnej współpracy w podrzucaniu i wyłapywaniu piłeczki do siatki. Bawiącym się beztrosko w powietrzną piłkę łapaną, dronom, za pomocą zaawansowanych algorytmów udało się tak bezbłędnie koordynować ruchy maszyn w powietrzu. Miały też zdolność uczenia się w tzw. czasie rzeczywistym. Gdy popełniały błąd przy wyłapywaniu piłeczki, potrafiły go zapamiętać i za następnym razem korygować swój ruch tak, aby go nie powtórzyć.
Potem naukowcy z Uniwersytetu Harvarda postanowili wykorzystać umysł roju, a konkretnie roju termitów, do stworzenia zespołów robotów zdolnych do efektywnej wspólnej pracy nad skomplikowanymi konstrukcjami. Prace nad opracowanym na uczelni nowatorskim systemem TERMES opisane zostały w magazynie "Science".
Roboty w roju, który może liczyć kilka lub tysiące sztuk, mają rozmiary zbliżone do ludzkiej głowy. Każdy z osobna jest zaprogramowany do wykonywania stosunkowo prostych czynności - jak podnieść i opuścić "cegiełkę", jak się poruszać do przodu i do tyłu, jak się obrócić i jak wspinać się po konstrukcji. Pracując w zespole, nieustannie obserwują inne roboty oraz powstającą konstrukcję, przystosowując na bieżąco swoje czynności do potrzeb w danym miejscu. Taka forma komunikacji wzajemnej w grupie owadów nazywa się stygmergią.

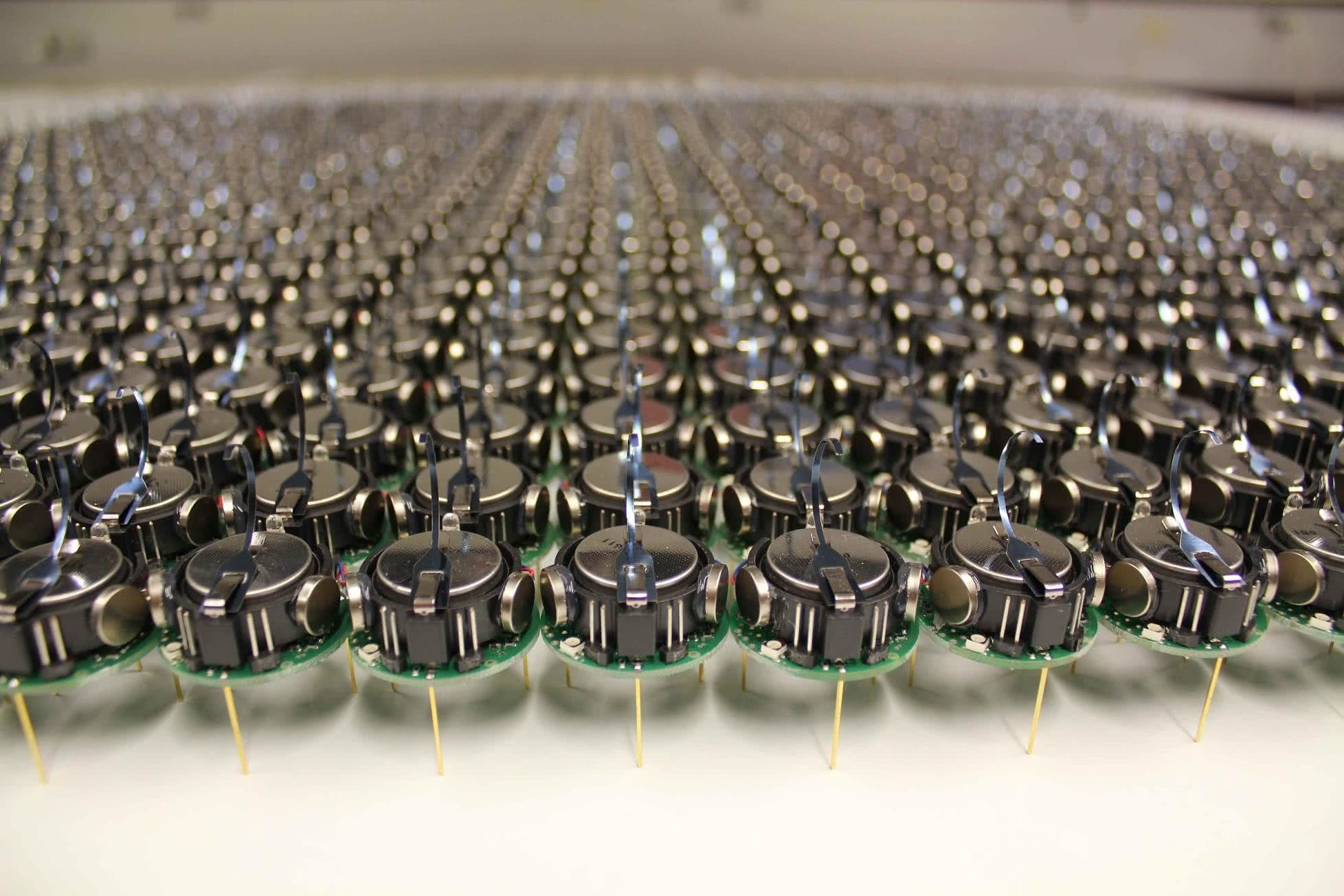
Specjalistom z Harvardu udało się w kolejnych latach stworzyć kolejny "inteligentny rój" robotów, liczący tysiąc urządzeń (dokładnie 1024). Roboty - składniki tego systemu, nazwane przez konstruktorów "kilobotami" (2), działając kolektywnie, potrafią na przykład formować określone, zadane przez operatora kształty, np. gwiazdę lub literę "K", która jest ich swoistym "podpisem".
Konstrukcja kilobotów nie była skomplikowana. Miały kilka centymetrów średnicy i stały na cienkich patyczkowatych nóżkach. Szef laboratorium, które stworzyło ten rój, Radhika Nagpal, tłumaczył w magazynie "Science", że zamiarem konstruktorów było odtworzenie zasad rządzących rojami owadów społecznych, np. mrówek. Za kolaborację wśród kilobotów odpowiadał algorytm TERMES, który był już stosowany we wcześniej omawianym systemie zarządzania rojami prostych robotów. Tworzony przez kiloboty rój jest na tyle inteligentny, że potrafi np. korygować swoje własne błędy. Gdy np. powstanie korek wskutek natłoku poruszających się robotów, te, które są w pobliżu, zaczynają pracować i współpracować w rozładowaniu zatoru.
Innym rodzajem układu robotów zespołowych była konstrukcja z kostek opracowana w Massachusetts Institute of Technology (MIT). Budzi ona skojarzenia z zabawką - klockami magnetycznymi. Jednak klocki, z których się składa, układają się w kształty według wcześniej wprowadzonych programów. Moduły w kształcie klocków łączą się ze sobą magnetycznie. Zbudowano dopiero dość prosty prototyp, ale specjaliści mówią o wspaniałych perspektywach, jakie pomysł ten niesie dla projektowanych rojów robotów, konstrukcji składanych z wielu elementów o różnych zastosowaniach, np. automatów składających się i zastępujących uszkodzone elementy budynków, uniwersalnych narzędziach zmieniających kształty i zastosowania, a nawet o meblach, które potrafią zmieniać kształty i dostosowywać się do bieżących potrzeb ludzi.
Małe, szczególnie te uspołecznione, owady są częstym źródłem inspiracji dla konstrukcji tego rodzaju. Naukowcy z jednego z czołowych na świecie ośrodków w dziedzinie robotyki, Georgia Institute of Technology, postanowili skupić się na mrówkach, a zwłaszcza na ich sposobach poruszania i radzenia sobie w trudnym terenie, w celu skopiowania technik i metod stosowanych przez owady przy konstrukcji doskonalszych robotów.
Badacze zbudowali specjalny, podobny do terrarium wypełnionego piaskiem, poligon dla mrówek, który wyposażyli w mikrokamery zdolne do rejestrowania ruchów wykonywanych w ogromnym tempie. Badają sposoby poruszania się w sypkim ośrodku, metody wydostawania się przez owady z tarapatów i budowania stabilnych tuneli w gruncie. Wyniki tych obserwacji i studiów nad owadami mogą, taką nadzieję przynajmniej żywią naukowcy, pomóc w konstrukcji nowej generacji robotów, np. ratowniczych, które przeszukiwałyby zwały ziemi lub piasku w poszukiwaniu zasypanych ofiar.
Inwazja do wnętrza ciała
Bioinspiracje nie ograniczają się do owadów. Międzynarodowy zespół badawczy z Universytetu Twente i Niemieckiego Uniwersytetu w Kairze stworzył mikroroboty MagnetoSperm, inspirowane plemnikami. Można je kontrolować za pomocą oscylującego słabego pola magnetycznego. Roboty o długości 322 mikronów są zbudowane z pokrytej grubą warstwą kobaltu i niklu główki oraz wici. Gdy poddaje się je działaniu oscylującego pola magnetycznego, na ich główkę działa moment magnetyczny, przez co wić zaczyna się poruszać. Naukowcy mogą sterować niby-plemnikami, kierując linie pola magnetycznego w stronę punktu orientacyjnego.
MagnetoSperm można wykorzystać zarówno do składania, jak i manipulowania obiektami w skali nano i mikro. Akademicy mówią o zastosowaniach biomedycznych, dostarczaniu leków, zapłodnieniu in vitro, sortowaniu komórek czy oczyszczaniu zatkanych naczyń.
Byłby to wstęp do inwazji rojów nanorobotów (3) na nasze ciało. Nanoroboty zbudowane z nanorurek lub innych mikroskopijnych struktur mogłyby używać tlenu i glukozy obecnych wewnątrz ciała jako źródeł energii, prowadzone są również prace nad użyciem w tym celu fal dźwiękowych. Mogłyby służyć do naprawiania złamanych kości, usuwania wewnętrznych zbliznowaceń, blaszek miażdżycowych, tkanek odpowiedzialnych za chorobę Alzheimera, a nawet wykonywania wewnętrznych operacji chirurgicznych czy zwalczania chorobotwórczych mikroorganizmów oraz regeneracji narządów. Mogłyby też pomagać w usuwaniu kamienia nazębnego czy oczyszczaniu porów skóry.
Naukowcom z Centrum Medycznego Uniwersytetu Columbia udało się stworzyć całą flotę molekularnych "robotów", które mogą dotrzeć do określonych komórek krwi oraz oznakować je na potrzeby leczenia farmakologicznego lub w celu ich zniszczenia. Nanoroboty te to kompilacje cząsteczek DNA, które zostały zaprojektowane do poszukiwania konkretnego rodzaju ludzkich komórek krwi i oznaczania ich znacznikiem fluorescencyjnym, umożliwiając leczenie lub likwidowanie chorych komórek, bez szkodliwego oddziaływania na zdrowe tkanki. Wykonane z nici DNA tzw. roboty origami wstrzyknięto karaluchom. W kontakcie z chorymi komórkami DNA się rozwijało i uwalniało zawarte w środku leki. Zdaniem naukowców precyzja i poziom kontroli, jaki zapewniają, można porównać z systemami komputerowymi.
Inżynierowie z Uniwersytetu Illinois skonstruowali "bioboty" napędzane przez komórki mięśni. Konstrukcje te, wykonane z drukowanego techniką 3D hydrożelu i częściowo żywych komórek, mają rozmiary mniejsze niż centymetr. Mechanizmem napędowym są tu pasma komórek mięśniowych, wzbudzane impulsami elektrycznymi. Naukowcy mają dzięki nim kontrolę nad ruchami "biobotów". Ich budowa została zainspirowana połączeniami mięśni, ścięgien i kości w żywych organizmach.
Natomiast na Uniwersytecie Penn State udało się umieścić nanomotory w żywych ludzkich komórkach i sterować ich ruchami za pomocą fal dźwiękowych o wysokiej częstotliwości oraz magnesów. Nanoroboty są zbudowane z maleńkich pręcików o długości 3 mikrometrów i przekątnej 300 nanometrów, czyli mniej niż grubość ludzkiego włosa. Zrobione są z metali: rutenu i złota. Zostały wchłonięte przez komórki rakowe typu HeLa. Po skupieniu na nanomotorach fal akustycznych zaczęły szybko przemieszczać się wewnątrz nich. O ile fale dźwiękowe wykorzystywane są jako "napęd", o tyle siły magnetyczne jako "stery" do kierowania mikrorobotów w określonych kierunkach. Specjaliści przewidują, że kolejne modele mikrorobotów będą obdarzone dalej idącą autonomią, by mogły same szukać chorych komórek i podjąć odpowiednie działania naprawcze.
W 2018 naukowcy opracowali nową metodę kontroli nanobotów wewnątrz ludzkiego ciała. Nowy sposób został odkryty dzięki Chińskiemu Uniwersytetowi w Hongkongu (CUHK), metodzie, która może pomóc chirurgom w wykonywaniu złożonych zadań medycznych. Badania prowadzone są przez profesora nadzwyczajnego Zhang Li na Wydziale Inżynierii Mechanicznej i Automatyki uniwersytetu w Hongkongu. Zainspirowany stadami ptaków i ławicami ryb, zespół Zhanga użył pola magnetycznego do kontrolowania ruchów nanobotów i wdrażania rojowych zachowań.
Nanocząsteczki, miliony nanocząsteczek magnetycznych, mogą zmieniać swoją formę w zależności od środowiska, z którym mają do czynienia. Mogą one podobno rozszerzać się, kurczyć, dzielić i łączyć, w swoim roju. Metoda ta mogłaby być wykorzystywana przez chirurgów do wysyłania nanobotów przez trudno dostępne do nawigacji przestrzenie, mówią badacze. Mogą być one również rzekomo wykorzystywane do ukierunkowanego dostarczania leków, terapii nowotworów i operacji okulistycznych. Zespół rozpoczął prowadzenie testów na zwierzętach dla tego procesu we współpracy ze szpitalem uczelnianym.
Oczywiście nie trzeba chyba tłumaczyć, że "wpuszczanie" rojów nanobotów do organizmu budzi również ogromne kontrowersje, od obaw o toksyczność takich urządzeń, po różne uboczne, niekorzystne efekty, od zdrowotnych po skutki dla naszej prywatności.
Zamiast centralnego sterowania
Idea współpracy dużej liczby robotów w zespole czy w stadzie nie jest niczym nowym. Jest też faktem dobrze znanym, że koordynacja w czasie i przestrzeni takiego roju to poważne wyzwanie, z którym nie poradzono sobie jeszcze w pełni zadowalający sposób. Niektórzy specjaliści, jak np. Marco Dorigo (4) na Uniwersytecie Libre de Bruxelles w Belgii, pracują na rozwiązaniami w tej dziedzinie od dziesięcioleci. Jego zespół opublikował niedawno w "Nature Communications" opis nowatorskiej metody wzajemnej komunikacji i koordynacji rojów robotów.
Zazwyczaj wiele robotów jest sterowanych za pomocą jakiejś formy scentralizowanej kontroli, np. procesora, który jest zaprogramowany, by sterować działaniami każdego robota w roju. Problem z takim podejściem polega na tym, że w miarę wzrostu liczby robotów staje się ono coraz bardziej skomplikowane, a tym samym trudne obliczeniowo.
Dodatkowo, jeśli komputer sterujący robotami ulegnie awarii, cały system ulegnie awarii. Alternatywny pomysł naukowców pod wodzą Dorigo na "samoorganizację" zespołu robotów polega na tym, by roboty działały zarówno autonomicznie, jak i jako część grupy. Poszczególne jednostki mogłyby sterować i koordynować "kolegów", którzy są w pobliżu, przejmując w ten sposób zadanie sterowania od centralnej jednostki. Dorigo porównuje to do "prowadzenia za rękę" robota przez robota, gdy prowadzący staje się autonomicznym podmiotem sterującym.

Inny zespół badaczy pod kierownictwem Dany’ego Randalla oraz Daniela Goldmana, obu z Georgia Institute of Technology, starał się pokazać, że nawet najprostsze roboty mogą w roju wykonać zadania znacznie przekraczające możliwości jednego lub nawet kilku z nich. Skonstruowali proste tzw. BOBboty (5), które, jak sami opisują, są "tak głupie, jak tylko się da". Ich cylindryczne podwozia mają wibrujące szczotki pod spodem i luźne magnesy na ich obrzeżach, co powoduje, że mają tendencję do zbliżania się i grupowania z sąsiadami. Są proste, ale razem z innymi robotami-partnerami z roju tworzą, jak tłumaczy to Goldman w publikacji w "Science Advances", "zwarte agregaty zdolne np. do zbiorowego usuwania gruzu, który jest zbyt ciężki, aby pojedynczy robot mógł go ruszyć".
Wykorzystując idee z teorii prawdopodobieństwa i fizyki statystycznej, naukowcy dowodzą, że model roju ulega "przemianie fazowej" wraz z narastaniem oddziaływań magnetycznych, gwałtownie zmieniając się z rozproszonych jednostek w duże, zwarte skupiska.
Inne proponowane rozwiązanie to sterowane magnetyczne roju mikrorobotów na magnetycznym podłożu za pomocą tzw. smart-grid, czyli inteligentnej sieci. Zaletą takiego, opracowanego przez centrum badawcze SRI International, rozwiązania sterowania rojem robotów jest brak konieczności stosowania przewodów zasilających. Programowane do pracy w roju, mogą np. montować drobne komponenty urządzeń lub zajmować się składaniem układów elektronicznych. Ich ruchy kontrolowane są przez tablice z nadrukowanymi układami elektronicznymi oraz wbudowanymi układami elektromagnesów, po których się poruszają. Same mikroroboty potrzebują jedynie stosunkowo tanich magnesów.
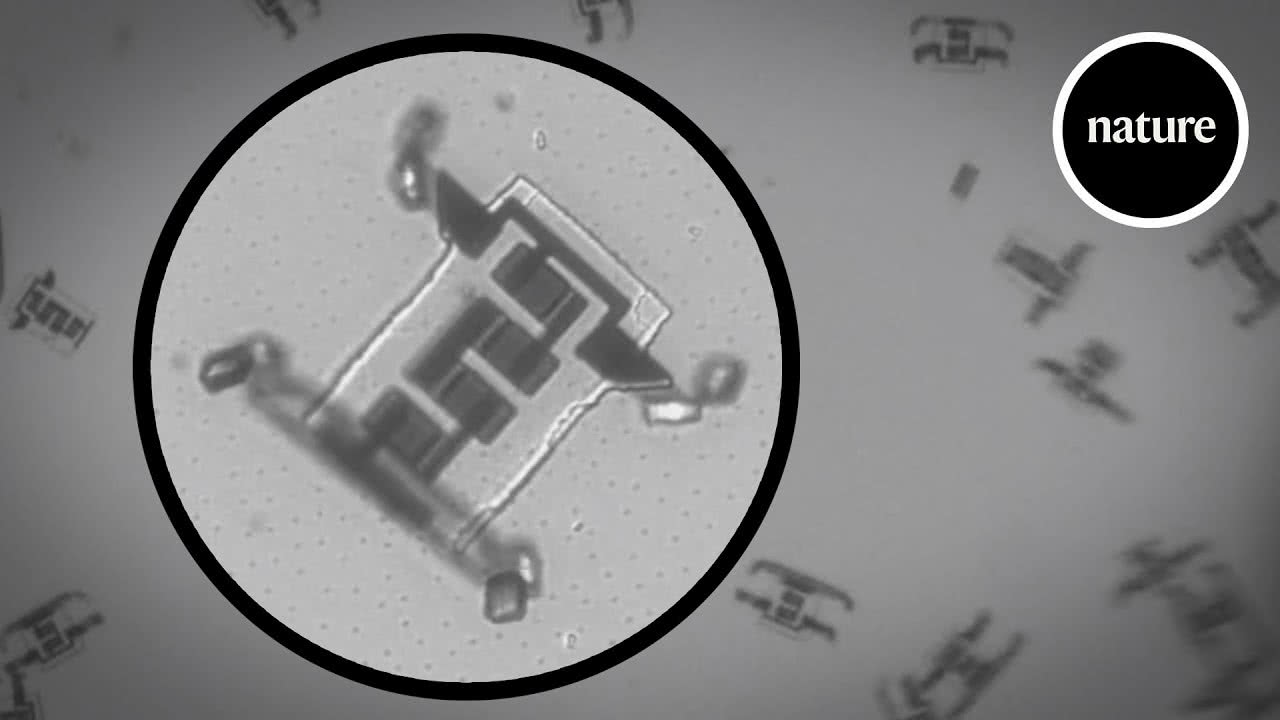
Zespół szwajcarskich badaczy z École polytechnique fédérale de Lausanne stworzył w 2019 r. armię prostych "mrówek-robotów", które według publikacji w "Nature", mogą komunikować się między sobą, przydzielać sobie role, wykonywać złożone zadania i wspólnie pokonywać przeszkody. Oznacza to, że choć proste w porównaniu z bardziej złożonymi autonomicznymi agentami, te inspirowane oryginałem roboty mogą rozwiązywać złożone problemy, takie jak poruszanie się po nierównych powierzchniach lub, tak, poruszanie stosunkowo dużymi obiektami.
Roboty, które mają kształt litery T i są nazywane tribotami, wyposażone są w czujniki podczerwieni i czujniki zbliżeniowe do wykrywania i komunikacji. Wykonane ze składanych cienkich materiałów, są również łatwe w produkcji. Podczas wykonywania zadań każdej robotycznej mrówce przypisuje się określoną rolę. Na przykład odkrywcy mogą wykrywać przeszkody fizyczne, takie jak obiekty lub ubytki. Odkrywcy przekazują informacje reszcie grupy, tak aby wyznaczony lider mógł udzielać instrukcji mrówkom pracującym razem w celu zebrania sił.
Wielu badaczy myśli o jak najwierniejszym odtworzeniu zachowania rojów niewielkich stworzeń w robotyce. Na brytyjskim Uniwersytecie Lincoln potraktowano analogię z owadami konsekwentnie i powstał pomysł wykorzystania feromonów do komunikacji pomiędzy maszynami. Tamtejsi specjaliści nie próbowali jednak tworzyć sztucznych feromonów, czyli substancji chemicznych, co w poprzednich badaniach proponowano. Ich system, nazwany COS-phi, to "wizualny feromon".
Małe roboty w roju otrzymują obraz ścieżki ruchu i za pomocą prostych czujników odbierają go, podążając w pożądanym, zgodnym z ruchem roju, kierunku. Wykorzystujący ekran LCD i tanią kamerę USB, system pozwala użytkownikom na symulowanie kilku feromonów, wyświetlanych w formie wizualnych ścieżek na ekranie oraz na zmianę ich natężenia, co pozwala na kontrolowanie eksperymentów. Wizualny obraz "feromonów" na ekranie jest wykrywany przez dwa czujniki światła w robotach roju, które naśladują czułki mrówek.
Algorytmy wykorzystywane do koordynacji rojów robotycznych przydadzą się w świecie opanowanym przez autonomiczne pojazdy, które muszą bezpiecznie i bezbłędnie poruszać się wśród mnóstwa innych takich samych pojazdów, nie rozbijając się i nie powodując niepotrzebnych korków. Aby stało się to możliwe, naukowcy z Uniwersytetu Northwestern opracowali zdecentralizowany algorytm z gwarancją bezkolizyjnej, płynnej jazdy. Badacze przetestowali ten algorytm w symulacji 1024 robotów i w roju 100 prawdziwych robotów w laboratorium. Roboty niezawodnie, bezpiecznie i sprawnie łączyły się, tworząc z góry określony kształt w czasie krótszym niż minuta. "Rozumiejąc, jak kontrolować nasze roje robotów, aby formowały kształty, możemy zrozumieć, jak kontrolować floty autonomicznych pojazdów w trakcie ich interakcji ze sobą", wyjaśniał w komunikacie dla mediów Michael Rubenstein z Northwestern, kierujący badaniami.
Algorytm do koordynacji postrzega podłoże pod robotami jako siatkę. Dzięki zastosowaniu technologii podobnej do GPS każdy robot wie, gdzie znajduje się na siatce. Przed podjęciem decyzji o tym, gdzie się przenieść, każdy robot wykorzystuje czujniki do komunikacji z sąsiadami, określając, czy pobliskie przestrzenie w obrębie siatki są wolne, czy nie. "Roboty odmawiają przeniesienia się w jakieś miejsce, dopóki to miejsce nie będzie wolne i dopóki nie dowiedzą się, że żaden inny robot nie przeniesie się w to samo miejsce", wyjaśniał Rubenstein. "Są ostrożne i rezerwują miejsce zawczasu".
Każdy robot może rejestrować czujnikami tylko trzech lub czterech swoich najbliższych sąsiadów. Nie widzą całego roju, co ułatwia skalowanie systemu. Roboty współdziałają lokalnie, aby podejmować decyzje bez globalnej informacji. W roju Rubensteina 100 robotów może współdziałać, tworząc kształt w ciągu minuty. Rubenstein wyobraża sobie, że jego algorytm może być użyty we flotach samochodów bez kierowców i w zautomatyzowanych magazynach.
Wcześniej, bo jeszcze w 2014 r., firma Deep Space Industries opracowała we współpracy z kanadyjskim uniwersytetem w Toronto system, który działa podobnie, ale na orbicie Ziemi - przenosi zadanie sterowania niewielkimi satelitami z człowieka na maszynę a dokładniej na innego satelitę. Docelowo to rozwiązanie miało prowadzić do powstania autonomicznych układów typu roje nanosatelitów.
Podczas demonstracji niewielki satelita CanX-4 programował ruchy innego satelity CanX-5. Była to symulacja zmiany orbity przy użyciu układu napędowego sterowanego satelity. Sygnały przesyłane były za pomocą specjalnej sieci łączności radiowej. Był to pierwszy przypadek, w którym jedna bezzałogowa jednostka kosmiczna "dowodziła" drugą, bez udziału ludzkiego operatora. Dotychczas sterowanie satelitami, nawet tymi najmniejszymi było zadaniem ludzkim. To człowiek musiał zadbać o to, aby urządzenia zajęły właściwe orbity, zmieniły je w razie potrzeby, oraz choćby o to, aby nie zderzały się ze sobą. W dużych zespołach lub rojach nanosatelitów staje się to zadanie trudne i uciążliwe. Stąd dążenie do automatyzacji sterowania.
Wszędobylskie myszkowanie robotycznych chmar - od kosmosu po archiwa FBI
Skoro dotarliśmy do przestrzeni kosmicznej, to wielu specjalistów uważa, że roje autonomicznych robotów insektoidalnych mogą okazać się kluczem do przyszłej eksploracji planet, księżyców i asteroid. Można wskazać na wiele potencjalnych korzyści wynikających z użycia roju małych łazików w porównaniu do jednego, dużego. Na bardzo podstawowym poziomie istnieje wbudowana redundancja - jeśli łazikowi takiemu jak Perseverance NASA przydarzy się krytyczna awaria, misja jest w zasadzie zakończona, natomiast rój tracący poszczególne jednostki nie kończy wykonywania misji. Ponadto rój może samoczynnie składać się w pojedyncze podjednostki i szybciej pokonywać większy obszar, osiągając wiele celów równolegle, podczas gdy większy łazik musiałby wykonywać zadania po kolei.

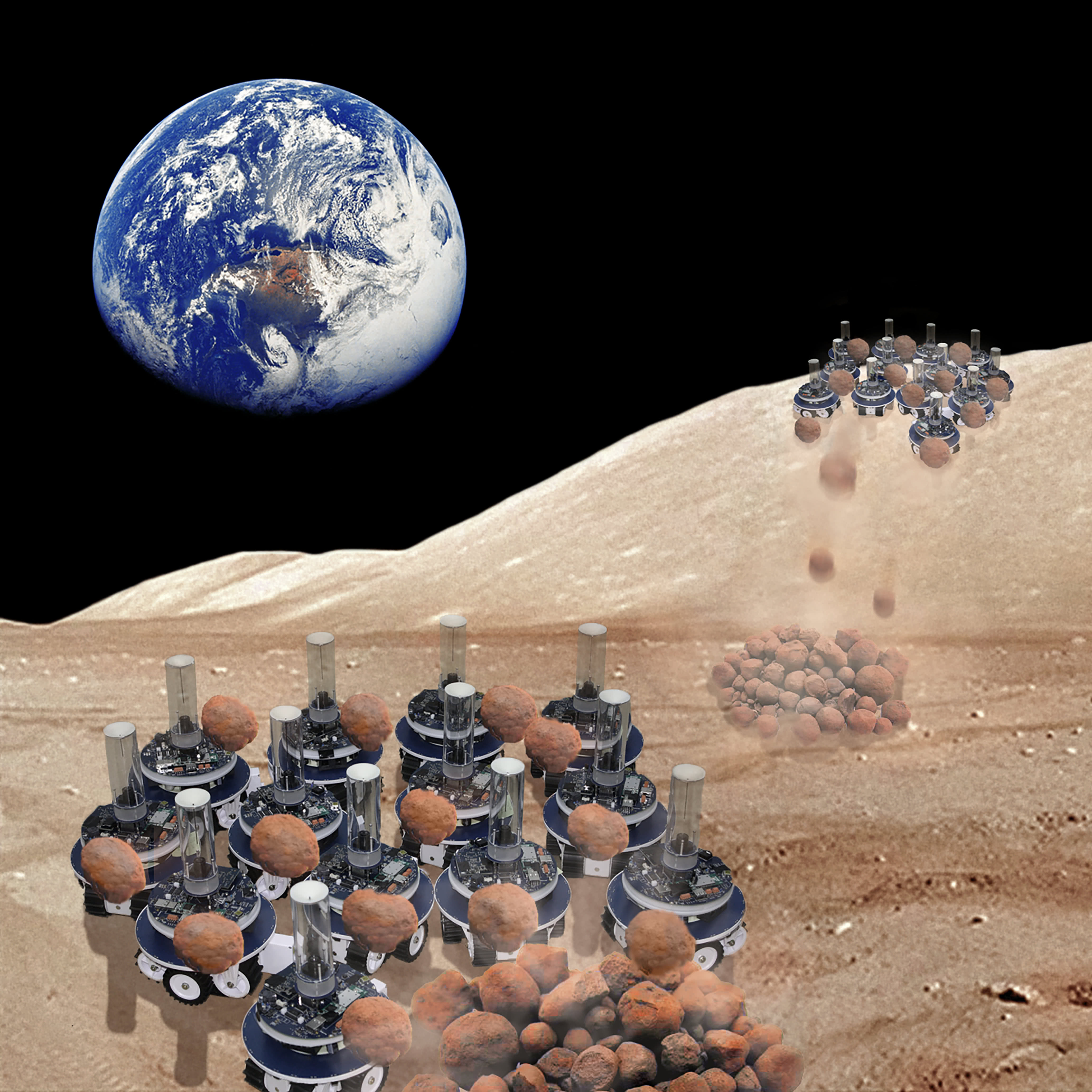
Nie muszą to być roboty-insektoidy. Kilka lat temu NASA zademonstrowała koncepcję zespołów robotów do eksploracji powierzchni ciał naszego Układu Słonecznego, wyglądających jak kuliste zabawki dziecięce. Konstrukcja sondy, która zawierałaby nie jeden łazik, a cały ładunek kulistych minirobotów (6) do eksploracji ciała pozaziemskiego, oparta jest na pomyśle wykorzystanym w, składanych z prętów i połączeń, zabawkach, np. typu Geo-Mag. Ze względu na podatną, elastyczną konstrukcję, znacznie mniej ryzykowne byłoby lądowanie na powierzchni Marsa czy Tytana. W jednym z projektów o nazwie OpGrav przewidywano wykorzystanie do badań asteroid roje małych kulek, które byłyby bezpieczniejszym i bardziej niezawodnym rozwiązanie podejścia do kosmicznej skały niż pojedynczy lądownik.
Jeden z nowszych pomysłów NASA zakłada wysłanie roju małych statków kosmicznych w celu zbadania atmosfery Wenus. Projekt zakłada wysłanie rozproszonych, małych, latających czujników zwanych Lofted Environmental and Atmospheric Venus Sensors (LEAVES), które będą penetrować gęstą atmosferę planety i informować o tym, co znajdą po drodze.
Naukowcy z Ohio Aerospace Institute zaprojektowali LEAVES tak, aby wyglądał i działał jak zaawansowany technologicznie, lekki latawiec, który zostanie wypuszczony z orbitalnego statku kosmicznego i będzie pasywnie prześlizgiwał się przez chmury w górnej atmosferze Wenus. Gdy znajdą się na miejscu, wbudowane czujniki i elektronika, które wykryją chemikalia atmosferyczne, przekażą swoje spostrzeżenia do statku kosmicznego. A potem, po około dziewięciu godzinach lotu, LEAVES albo spadną zbyt nisko, by móc kontynuować przydatne odczyty - albo zostaną zniszczone przez kwaśne, bogate w siarkę środowisko planety.
Wracając na Ziemię - coraz częściej słyszymy o pomysłach na wykorzystanie chmar robotów w różnych dziedzinach. Oprócz dość oczywistych koncepcji, jak np. roboty zastępujące pszczoły w zapylaniu roślin czy do innych rolniczych zastosowań, choćby w odchwaszczaniu upraw (7), pojawiają się pomysły coraz odważniejsze i nad wyraz innowacyjne.

Rolls-Royce zaprezentował w 2018 r. na targach lotniczych w Farnborough nową wizję konserwacji silników. W ramach swojej wizji IntelligentEngine firma zaprezentowała plany wykorzystania roju miniaturowych robotów przypominających karaluchy (8), które mają współpracować w celu kontroli wnętrza silników lotniczych bez konieczności demontażu. We współpracy z Uniwersytetem Harvarda i Uniwersytetem Nottingham, Rolls--Royce pracuje nad stworzeniem miniaturowych, współpracujących robotów o gabarytach 10 mm, które będą w stanie zapewnić operatorowi ludzkiemu obraz wideo na żywo z wnętrza silnika za pomocą małych kamer. Rój współpracuje z endoskopowym wężem, również robotem.
Pomysł na wykorzystanie większej liczby współpracujących w roju robotów ma też FBI, która ma obecnie zespół ponad stu robotów (9) do odzyskiwania poufnych informacji. Agencja wybrała zautomatyzowany system archiwizacji i wyszukiwania akt firmy AutoStore, który nie tylko usprawnia wyszukiwanie za pomocą robotów sterowanych radiowo, ale również optymalizuje przestrzeń, pozwalając na przechowywanie akt z minimalnym wykorzystaniem przestrzeni.
W obrębie obiektu roboty poruszają się po napowietrznej stalowej siatce, aby zidentyfikować, uzyskać dostęp i pobrać żądane teczki z każdego z kilkuset tysięcy pojemników. Oprogramowanie AutoStore śledzi numery akt i pojemników, umożliwiając robotom bezpieczną pracę bez dostępu jakichkolwiek niepowołanych podmiotów.

Wojskowe rojenie
Największe emocje oczywiście wywołują projekty wykorzystania rojów robotów, dronów i wszelkiego rodzaju automatów w wojskowości. Wspominaliśmy o izraelskim przypadku wykorzystania rojów na placu boju. Projekty takie mają już całkiem długą historię.
W listopadzie 2017 roku na YouTube ogromne wrażenie zrobił film wideo pokazujący zabójcze roje minidronów, "slaughterbotów" w przerażającym działaniu. Widzowie ujrzeli, że nie potrzebujemy ciężkich maszyn bojowych, czołgów, pocisków miotanych przez wielkie drony Predator, aby masowo i maszynowo zabijać ludzi. Widzimy w nich całkiem małe, ale nie mniej mordercze maszyny, operujące w ogromnych rojach.
Być może film był reakcją na głośny rekord pobity przez wojsko amerykańskie w lecie 2015 r., gdy wzbił się w powietrze rój złożony z pięćdziesięciu symultanicznie skoordynowanych jednostek UAV. Nowy system operacji maszynami bezzałogowymi różnił się od poprzednich rozwiązań, które zazwyczaj polegały na sterowaniu dronami w roju oddzielnie przez pojedynczych operatorów. Chmara maszyn w rekordowym locie była sterowana tylko przez dwóch operatorów. Stało się to możliwe dzięki ograniczonej autonomii - maszyny samodzielnie wykonują pewne czynności związane z koordynowanym lotem.
Siły powietrzne Stanów Zjednoczonych planują w nowej strategii połączenie samolotu myśliwskiego F-35 z zespołami takich właśnie maszyn bezzałogowych. Przy tym operatorem tych dronów miałby według najnowszych koncepcji być sam pilot myśliwca.
F-35 mógłby według tej nowej strategii wyruszać na misje w towarzystwie eskadry dronów, które połączone i sterowane w jednym systemie z pulpitu w samolocie wykonywałyby zadania rozpoznawcze, ostrzegające przed zagrożeniami, a także bojowe, polegające na wystrzeliwaniu dodatkowych rakiet z pozycji innych niż ostrzał z samolotu głównego. Dowodzenie zespołem dronów przez człowieka - pilota myśliwca uczestniczącego w akcji pozwala na szybsze reakcje niż w przypadku sterowania bezzałogowcami z oddalonych naziemnych stanowisk dowodzenia, zaś zupełnie autonomiczne systemy nie są jeszcze tak rozwinięte, aby mogły sprostać dynamice pola walki.
Roje małych dronów atakujących, które dezorientują i obezwładniają obronę przeciwlotniczą, mogą wkrótce stać się ważną częścią nowoczesnego arsenału wojskowego, powiedział w 2019 r. brytyjski sekretarz obrony, Gavin Williamson. Jak dodał, byłoby to coś, co oznaczałoby poważną ewolucję w działaniach wojennych z wykorzystaniem robotów. Niektórzy eksperci wojskowi mówili od lat: Technologia umożliwiająca zsynchronizowane roje dronów jest już dostępna, a przywódcy wojskowi zaczynają przyjmować pomysł wbudowania jej w swoje operacje.
Wojsko amerykańskie bada różne iteracje i zastosowania koncepcji roju dronów od ponad dekady, wykorzystując programy badawcze noszące nazwy takie jak Cicada, Gremlins i Valkyrie (10). Od 2006 roku Naval Research Lab prowadzi eksploracyjny program badawczo-rozwojowy o nazwie Close-in Covert Autonomous Disposable Aircraft, w skrócie Cicada. Przewiduje on malutkie, jednorazowe samoloty, które mają być rozmieszczone w dużej liczbie, aby "obsiać" obszary małymi czujnikami elektronicznymi, co mogłoby umożliwić wojskowy nadzór nad gęstymi obszarami dżungli bez wysyłania ludzkiego pilota na terytorium wroga.
Eksperymentalny program o nazwie Gremlins poszukuje sposobu na wystrzeliwanie małych, napędzanych silnikami odrzutowymi dronów z pokładu samolotu transportowego C-130 i odzyskiwanie ich później, skutecznie zamieniając samolot w latający lotniskowiec.

W jednym z eksperymentów z 2016 roku, który Pentagon nazwał "jednym z najbardziej znaczących testów systemów autonomicznych opracowywanych przez Departament Obrony", rój ponad stu mikrodronów został uwolniony z myśliwca F/A Super Hornet i latał w zespole, jak głosił komunikat "jako kolektywny organizm, z jednym, ale rozproszonym mózgiem do podejmowania decyzji, dostosowujący się do siebie nawzajem, tak jak roje widywane w naturze".
Kilkanaście dni przed informacjami o planach pogrzebania projektu X-47B przez US Army, Michael C. Horowitz, Sarah E. Kreps i Matthew Fuhrmann opublikowali pracę pod angielskim tytułem "The Consequences of Drone Proliferation: Separating Fact from Fiction" (Konsekwencje rozpowszechniania się dronów: oddzielanie faktów od fikcji).
Jednym z najnowszych zjawisk w technologii dronów wojskowych, o których piszą cytowani eksperci, są projekty rojów dronów, takie jak "ekonomiczny" program LOCUST (ang. Low-Cost UAV Swarming Technology), który zakłada skoordynowane loty kilkudziesięciu bezzałogowców naraz.
Nad systemem LOCUST pracuje Office of Naval Research. Program ten dla amerykańskiego Pentagonu ma kluczowe znaczenie, ponieważ zakłada użycie tanich, ale wysoko skutecznych maszyn na masową skalę (zatem oszczędności). Dotychczas przeprowadzono serię prób naziemnych. W testach brało udział początkowo dziewięć bezzałogowców, w kolejnych próbach liczba ta rośnie. Same bezzałogowce są wystrzeliwane niczym pocisk, po czym rozkładają skrzydła i dalej poruszają się autonomicznie. Co ważne, roje mogą działać całkowicie samodzielnie bez instrukcji przesyłanych z ziemi od operatorów. Taki rój dronów zamiast pojedynczej maszyny ma zapewnić całkowitą przewagę nad wrogiem, który nie będzie w stanie ani zareagować i zestrzelić tak dużej liczby dronów, ani ukryć się przed całym rojem monitorującym dany obszar.
Pentagon odtajnił kilka lat temu nagranie, na którym widać, jak odrzutowiec F-16 wypuszcza mikrodrony, lecąc z prędkością 692 km/h. Te mikrodrony mogą być wystrzeliwane z podajników flar myśliwca. Są one zamknięte w kanistrach, które po wystrzeleniu spadają na ziemię. Kanistry następnie pękają, uwalniając drony, które potem łączą się w rój. Pentagon nie powiedział jeszcze, do czego będą wykorzystywane te roje dronów, ale sugeruje się, że mogą one być tanim sposobem na podejmowanie misji obserwacyjnych.
Jak się okazuje, podobnymi torami idzie myślenie również chińskich kręgów wojskowych. Dowodzi tego pochodząca z ub. roku prezentacja Chińskiej Akademii Elektroniki i Technologii Informacyjnych (CAEIT), w której na nagraniu wideo widać test zestawu 48 uzbrojonych bezzałogowych jednostek wystrzeliwanych z wyrzutni "katiuszy" na ciężarówce. Drony przypominają pociski, z których po wystrzeleniu wyskakują skrzydełka. Z koordynacją w tym roju jest, jak przyznają sami Chińczycy, jeszcze problem, ale wiedzą, czego chcą.
Tymczasem w USA pomysły wojskowych idą coraz dalej. Pojawiły się informacje, że Pentagon próbuje zbudować technologię, która dawałaby żołnierzom możliwość kontrolowania dronów i ich rojów za pomocą umysłu. Miałyby do tego posłużyć nieinwazyjne interfejsy mózgowe BCI. Jak podał "Digital Trends", w ubiegłym roku zespół badaczy sztucznej inteligencji na uniwersytecie w Buffalo zainicjował projekt badań fal mózgowych i ruchów gałek ocznych w grupie około 25 graczy podczas gry wideo.
Plan jest taki, aby wykorzystać uzyskane dane do zbudowania zaawansowanej AI, aby mogła koordynować działania flot autonomicznych robotów wojskowych. Inaczej mówiąc, gracze stosujący podczas rozgrywki najbardziej nieprzewidywalne strategie i zdolni do ekstremalnych zachowań mają nauczyć sztuczną inteligencję tego, co trudno zazwyczaj przewidzieć.
Amerykańska Agencja Projektów Zaawansowanych Badań Obronnych (U.S. Defense Advanced Research Projects Agency), znana jako DARPA, przyznała zespołowi grant na badania. Naukowcy mają nadzieję, że opracują wydajne algorytmy, które będą w stanie kierować działaniami zespołów do 250 robotów na ziemi i w powietrzu, dając rojom możliwość samodzielnej nawigacji w nieprzewidywalnych warunkach.
Warto zwrócić uwagę, że rozwój techniki rojów dronów militarnych, zgodnie z regułą wyścigu zbrojeń, sprawia, że powstają systemy do walki z chmarami maszyn; np. japońskie Ministerstwo Obrony zapowiada opracowanie autonomicznych laserów, zdolnych do wyłączania, a nawet zestrzeliwania potencjalnie niebezpiecznych bezzałogowych statków powietrznych, także w dużych grupach.
Według serwisu Nikkei Asia, technologia ta mogłaby pojawić się w Japonii już w 2025 roku, a Ministerstwo Obrony ma opracować wraz z koncernem Kawasaki Heavy pierwsze prototypy broni antydronowej do 2023 roku. Japonia rozważa także zastosowanie broni mikrofalowej, "wyłączającej" drony pływające lub latające. Inne kraje, w tym Stany Zjednoczone i Chiny, pracują już nad podobną technologią. Jednak uważa się, iż lasery antydronowe nie zostały jeszcze nigdzie rozmieszczone.
Nieco bardziej tradycyjny niż lasery, ale kto wie czy nie równie skuteczny albo skuteczniejszy, jest pomysł rosyjski na roje dronów. Dwa lata po zmaganiach z dronami w Tartusie Rosja zaprezentowała samojezdne działo przeciwlotnicze Derywacja-PVO (11), które ma "z gradu wystrzeliwanych pocisków, które wybuchają odłamkami w powietrzu, tworzyć nieprzenikalną barierę dla wrogich dronów". Derywacja została zaprojektowana, aby wybić małe bezzałogowe statki powietrzne, które lecą kilkaset metrów nad ziemią. Według serwisu "Russian Beyond" Derywacja bazuje na wozie bojowym piechoty BPM-3. Ma on stację broni automatycznej AU-220M, która wystrzeliwuje do 120 pocisków na minutę.

DARPA realizuje projekt inteligentnych pocisków, o nazwie MAD-FIRES, które miałyby służyć do walki z rojami dronów, składającymi się z wielu niedużych i szybko poruszających się obiektów. Dodatkowym utrudnieniem w zwalczaniu dronów jest fakt, że nie ma w nich wiele metalu, więc bronie sterowane systemami radarowymi nie są przeciwko nim zbyt skuteczne. Prowadzony przez DARPA wspólnie z firmą Raytheon projekt MAD-FIRES (Multi Azimuth Defense Fast Intercept Round Engagement System) stawia sobie za cel opracowanie inteligentnej amunicji. Pociski mają być nie tylko niewielkie i szybkie, ale też wyposażone w naprowadzanie.
Zatem na koniec naszego raportu powiało grozą. Jednak, jak łatwo po chwili zastanowienia zauważyć, roje dronów to tylko kolejne narzędzie, które jak każde narzędzie w historii ludzkości można wykorzystać do dobra i zła. Można za pomocą narzędzi ludziom pomagać, pracować, budować, tworzyć ciekawe nowe rzeczy, ale można też krzywdzić, niestety. Roje robotów nie są same w sobie ani złe ani dobre. To od nas zależy, do czego je spożytkujemy.
Mirosław Usidus